

SYMA X8PRO 購入(衝動買い) [ドローン]
10月20日に注文しEMSで10月30日に無事到着。
聞いたことのない運送会社だったので、また地球の裏を回ってくるのかと心配していましたが、今回は飛行機で関空まで直接きていたようです。
早速開梱。組み立てします。

梱包箱はギリギリサイズの手作り品w

X8SW用のバッテリーを同時注文していたため、すでに開封済み。

内箱は2個

SUREHOBBYさんの送料は1個1個積算されるのに、これはないだろう・・・・と個人的に思います。
パッケージ1式 取扱説明書は折れてくしゃくしゃw

上がX8SW用下がX8PROの付属品 ロックボタンの色が違うだけ(若干高さも違うか)

SW用で動作確認OKでした。基本的にX8SWと同じ筐体なので、部品に関してはほぼ互換性があるのではないでしょうか。
とりあえずUSER MANUAL通りに組み立て。英語なので絵だけが頼りですw
まず、プロペラガードですが、差し込むだけ。穴に

突っ込む

次にプロペラですが、ドローンには2種類のプロペラがあります。
順回転用(CW)と逆回転用(CCW)
X8PROはAとBの2種類 本体とプロペラにそれぞれ刻印されていますので、
Aの腕にはAのプロペラ
Bの腕にはBのプロペラ
を取り付けます。
プロペラはちょっと出っ張ってる方が下になります。穴の形に合わせてプロペラを回転軸に入れてから
付属のスパナを使い回転軸を固定。

その後で、下に押し付けながら60度位回転させるとロックができるようです。

押し付けながら回転させてロック

H502Eよりはるかに簡単というかビス止めしないので失敗する可能性がないですね。
そして脱落防止用のキャップをかぶせたらプロペラ取り付け終了です。

次は足、これもワンタッチ取り付けです。本当に簡単ですね。


最後にカメラを胴体下部にスライドさせて取付け、コネクタを差し込んで完成です。

H502Eに慣れているので、この本体のでかさにびっくりです。

早速飛ばしましょう。
・本体の電源を長押しして入れ(ピッっとなるまで)
・プロポの電源を入れ
・バインド プロポの左レバーを ↑ ↓の順番に操作すると、本体の赤色LEDが点灯。
・キャリブレーション プロポの左レバーを右下入れたまま右上下のボタンを押すと赤色LEDがゆっくり点滅。
・本体を水平にクルクル(赤高速点滅) → 垂直にクルクル(赤常灯)
・しばらくほっとくと、緑LEDにが短く点滅するとGPS捕捉完了?で飛行可能です。

詳しくはyoutubeにチュートリアルがあるので見ると細かい所がわかると思います。
説明書訳
保護部品(ブレードガード)の取り付け:
保護部品(ブレードガード)を図のようにドローンに挿入します。
保護部品(ブレードガード)の取り外し:
図のようにロックレバー上向きに押しながら保護部品(ブレードガード)を取り外します。
ブレードの取り付け:
1.図のようにブレードを挿入します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。次に
ブレードAを軸に押しつけながら、ブレードを反時計方向に回してロックします。
ブレードBは時計回りに回してロックします。
3.図のようにブレードカバーを取り付けます。
ブレードの取り外し:
1.図のようにブレードカバーを取り外します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。
次にブレードAを軸に押し付けながら、ブレードを時計回りに回して緩めます。
ブレードBは反時計回りに回して緩めます。
3.ブレードを取り外します。
カメラの取り付け手順:
1.接続部にカメラを置き、図のように押します。
(説明書が違う。接続部にカメラをスライド(←向き)させ取り付けます。)
2.図のようにカメラのケーブルをソケットに接続します。
カメラの取り外し手順:
1.図のようにカメラのケーブルをソケットから引き抜きます。
2.ロックボタンを押しながらカメラをスライドさせ取り外します。
スマートフォン保持用クリップホルダーの取り付け方法:
1.リモコンの上部の接続部にスマートフォンのクリップホルダーを差し込みます。
2.ハンドルを押しクリップの開き方を調整してスマートフォンをはさみます。
・・・ こんな所翻訳必要ないか。
中略w
6ページ後半に飛びます。
1.操作方法:
1.最初に飛行に必要な安全な広い場所を見つける。
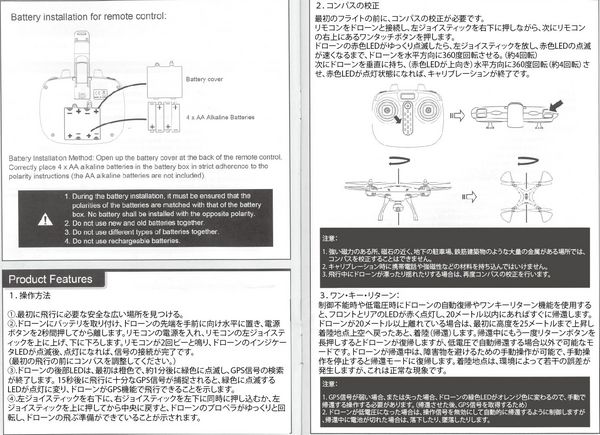
2.ドローンにバッテリを取り付け、ドローンの先端を手前に向け水平に置き、電源ボタンを2秒間押してから離します。リモコンの電源を入れ、リモコンの左ジョイスティックを上に上げ、下に下ろします。リモコンが2回ビーと鳴り、ドローンのインジケータLEDが点滅後、点灯になれば、信号の接続が完了です。
(最初の飛行の前にコンパスを調整してください。)
3.ドローンの後部LEDは、最初は橙色で、約1分後に緑色に点滅し、GPS信号の検索が終了します。 15秒後に飛行に十分なGPS信号が捕捉されると、緑色に点滅するLEDが点灯に変り、ドローンがGPS機能で飛行できることを示します。
4.左ジョイスティックを右下に、右ジョイスティックを左下に同時に押し込むか、左ジョイスティックを上に押してから中央に戻すと、ドローンのプロペラがゆっくりと回転し、ドローンの飛ぶ準備ができていることが示されます。
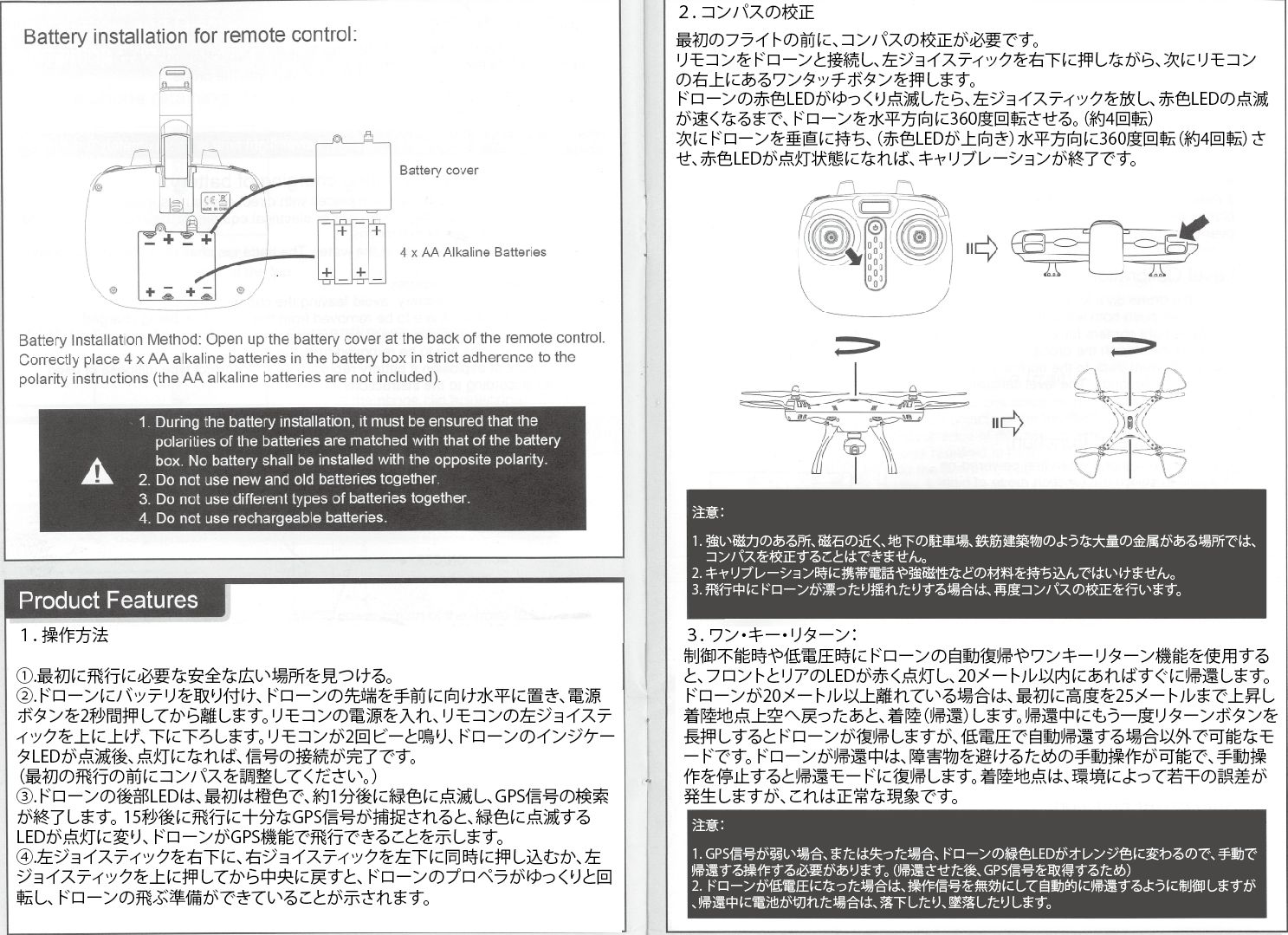
コンパスの校正
最初のフライトの前に、コンパスの校正が必要です。
リモコンをドローンと接続し、左ジョイスティックを右下に押しながら、次にリモコンの右上にあるワンタッチボタンを押します。
ドローンの赤色LEDがゆっくり点滅したら、左ジョイスティックを放し、赤色LEDの点滅が速くなるまで、ドローンを水平方向に360度回転させる。(約4回転)
次にドローンを垂直に持ち、(赤色LEDが上向き)水平方向に360度回転(約4回転)させ、赤色LEDが点灯状態になれば、キャリブレーションが終了です。
Note:
1.Never calibrate the compass in a strong magnetic field or near the bulk metal, such as magnetite, parking lot and buildings with underground reinforced.
2.Never carry the ferromagnetic material, such as mobile phone, with you when calibrating.
3.Take a compass calibration when the drone drifting or swinging around during the flight.
注意:
1. 強い磁場の所、磁石、地下の駐車場、鉄筋建築物のような大量の金属がある場所では、コンパスを校正することはできません。
2. キャリブレーション時に携帯電話や強磁性などの材料を持ち込んではいけません。
3. 飛行中にドローンが漂ったり揺れたりする場合は、再度コンパスの校正を行います。
3.ワン・キー・リターン:
制御不能時や低電圧時にドローンの自動復帰やワンキーリターン機能を使用すると、フロントとリアのLEDが赤く点灯し、20メートル以内にあればすぐに帰還します。ドローンが20メートル以上離れている場合は、最初に高度を25メートルまで上昇し着陸地点上空へ戻ったあと、着陸(帰還)します。帰還中にもう一度リターンボタンを長押しするとドローンが復帰しますが、低電圧で自動帰還する場合以外で可能なモードです。ドローンが帰還中は、障害物を避けるための手動操作が可能で、手動操作を停止すると帰還モードに復帰します。着陸地点は、環境によって若干の誤差が発生しますが、これは正常な現象です。
注意
.GPS信号が弱い場合、または失った場合、ドローンの緑色LEDがオレンジ色に変わるので、手動で帰還する操作する必要があります。(帰還させた後、GPS信号を取得するため)
2.ドローンが低電圧のときは、操作を停止して自動的に帰還するように制御しますが、帰還中に電池が切れた場合は、落下したり、墜落したりします。
4.低電圧保護:
ドローンの4つのインジケータLEDが赤色に変わり、フロントLEDが点滅してドローンのバッテリ電力が低いことを示し、その後帰還ポイントに戻ります。
5.過電流保護:
ドローンが異物からの直接的な衝撃に遭遇した場合、または邪魔になった場合、またはブレードが回転していない場合は、無人機は過電流保護モードに入ります。
6.レベル校正機能:
ドローンを水平面に置き、同時に左右のジョイスティックを右下隅に2〜3秒押します。
LEDが速く点滅し、約2〜3秒後に通常の状態に戻りれば レベル校正は成功です。
7.高/低速モード切替機能:
最初の電源投入時はデフォルトで低速モードです。 右ジョイスティックを短時間押して高/低速モードを切り替えることができます。 右ジョイスティックを短時間押して高速モードに切り替えるとリモコンから2回ビープ音が鳴り、高速モードに切り替わります。再度ジョイスティックを短時間押して高速モードから低速モードに切り替えると、リモコンから1回ビープ音が鳴り、低速モードになります。
8.GPS座標および航空写真:
ドローンがリターンポイントを記録し終えると、定点(単焦点)で航空写真を正確に撮ることができ、カメラは0-90度の範囲でカメラの角度を上下に調整してビデオを撮影したり録画したりできます。
広い場所では、飛行範囲は200メートル以上であり、GPS座標の限界高度は約100メートルである
9.ホバリング機能:
左のジョイスティック(スロットル)を使用して無人機の降下飛行を制御した後、
左のジョイスティック(スロットル)を離すと、ジョイスティックが離されたときにドローンがその高さでホバリングします。
10.ヘッドレス機能:
1.順方向の定義:
•リモコンの電源ボタンを押します。
•バッテリーをドローンに接続し、ドローンの電源ボタンを押すと、ドローンの方向がヘッドレスモードの新しい順方向として指定されます。
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴れば、周波数と順方向の定義され、ヘッドレス機能が設定できたことを意味します。
2.前進方向の定義のための校正:
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴ると、周波数と順方向の定義が完了したことを意味します。
ドローンがヘッドレスモードで異物と直接衝突すると、ドローンの飛行方向を補正位置に置いた後に左右のジョイスティックを同時に左下隅に押し込むだけでよい。 ドローンのインジケータLEDが点灯した後、3秒間ゆっくりと点滅すれば校正が完了したことを示します。
3ヘッドレス機能と通常機能との間のトグリング:
ドローンが対応する周波数とマッチした後、ドローンはデフォルトで通常のパターンになります。 このとき、ドローンのインジケータLEDは、点灯しています。 リモコンの右ジョイスティックを2秒間押した後、リモコンから「ビー、ビー、ビー」と音が出て、ヘッドレスモードに入ったことを示します。右ジョイスティックを2回押して (ヘッドレスモードの状態では、無人機の4つのインジケータライトが4秒に1回ゆっくりと1回ずつ)、長い「ビープ音」の音が聞こえて終了ステータスが表示されます。
•ヘッドレスモードでは、オペレータは無人機の頭部位置を区別する必要がなく、リモコンの右のジョイスティックの方向を使用してドローンの方向を正面/背面面で左右に制御するだけで済みます。
聞いたことのない運送会社だったので、また地球の裏を回ってくるのかと心配していましたが、今回は飛行機で関空まで直接きていたようです。
早速開梱。組み立てします。

梱包箱はギリギリサイズの手作り品w

X8SW用のバッテリーを同時注文していたため、すでに開封済み。

内箱は2個

SUREHOBBYさんの送料は1個1個積算されるのに、これはないだろう・・・・と個人的に思います。
パッケージ1式 取扱説明書は折れてくしゃくしゃw

上がX8SW用下がX8PROの付属品 ロックボタンの色が違うだけ(若干高さも違うか)

SW用で動作確認OKでした。基本的にX8SWと同じ筐体なので、部品に関してはほぼ互換性があるのではないでしょうか。
とりあえずUSER MANUAL通りに組み立て。英語なので絵だけが頼りですw
まず、プロペラガードですが、差し込むだけ。穴に

突っ込む

次にプロペラですが、ドローンには2種類のプロペラがあります。
順回転用(CW)と逆回転用(CCW)
X8PROはAとBの2種類 本体とプロペラにそれぞれ刻印されていますので、
Aの腕にはAのプロペラ
Bの腕にはBのプロペラ
を取り付けます。
プロペラはちょっと出っ張ってる方が下になります。穴の形に合わせてプロペラを回転軸に入れてから
付属のスパナを使い回転軸を固定。

その後で、下に押し付けながら60度位回転させるとロックができるようです。

押し付けながら回転させてロック

H502Eよりはるかに簡単というかビス止めしないので失敗する可能性がないですね。
そして脱落防止用のキャップをかぶせたらプロペラ取り付け終了です。

次は足、これもワンタッチ取り付けです。本当に簡単ですね。


最後にカメラを胴体下部にスライドさせて取付け、コネクタを差し込んで完成です。
H502Eに慣れているので、この本体のでかさにびっくりです。

早速飛ばしましょう。

詳しくはyoutubeにチュートリアルがあるので見ると細かい所がわかると思います。
説明書訳
保護部品(ブレードガード)の取り付け:
保護部品(ブレードガード)を図のようにドローンに挿入します。
保護部品(ブレードガード)の取り外し:
図のようにロックレバー上向きに押しながら保護部品(ブレードガード)を取り外します。
ブレードの取り付け:
1.図のようにブレードを挿入します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。次に
ブレードAを軸に押しつけながら、ブレードを反時計方向に回してロックします。
ブレードBは時計回りに回してロックします。
3.図のようにブレードカバーを取り付けます。
ブレードの取り外し:
1.図のようにブレードカバーを取り外します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。
次にブレードAを軸に押し付けながら、ブレードを時計回りに回して緩めます。
ブレードBは反時計回りに回して緩めます。
3.ブレードを取り外します。
カメラの取り付け手順:
1.接続部にカメラを置き、図のように押します。
(説明書が違う。接続部にカメラをスライド(←向き)させ取り付けます。)
2.図のようにカメラのケーブルをソケットに接続します。
カメラの取り外し手順:
1.図のようにカメラのケーブルをソケットから引き抜きます。
2.ロックボタンを押しながらカメラをスライドさせ取り外します。
スマートフォン保持用クリップホルダーの取り付け方法:
1.リモコンの上部の接続部にスマートフォンのクリップホルダーを差し込みます。
2.ハンドルを押しクリップの開き方を調整してスマートフォンをはさみます。
・・・ こんな所翻訳必要ないか。
中略w
6ページ後半に飛びます。
1.操作方法:
1.最初に飛行に必要な安全な広い場所を見つける。
2.ドローンにバッテリを取り付け、ドローンの先端を手前に向け水平に置き、電源ボタンを2秒間押してから離します。リモコンの電源を入れ、リモコンの左ジョイスティックを上に上げ、下に下ろします。リモコンが2回ビーと鳴り、ドローンのインジケータLEDが点滅後、点灯になれば、信号の接続が完了です。
(最初の飛行の前にコンパスを調整してください。)
3.ドローンの後部LEDは、最初は橙色で、約1分後に緑色に点滅し、GPS信号の検索が終了します。 15秒後に飛行に十分なGPS信号が捕捉されると、緑色に点滅するLEDが点灯に変り、ドローンがGPS機能で飛行できることを示します。
4.左ジョイスティックを右下に、右ジョイスティックを左下に同時に押し込むか、左ジョイスティックを上に押してから中央に戻すと、ドローンのプロペラがゆっくりと回転し、ドローンの飛ぶ準備ができていることが示されます。
コンパスの校正
最初のフライトの前に、コンパスの校正が必要です。
リモコンをドローンと接続し、左ジョイスティックを右下に押しながら、次にリモコンの右上にあるワンタッチボタンを押します。
ドローンの赤色LEDがゆっくり点滅したら、左ジョイスティックを放し、赤色LEDの点滅が速くなるまで、ドローンを水平方向に360度回転させる。(約4回転)
次にドローンを垂直に持ち、(赤色LEDが上向き)水平方向に360度回転(約4回転)させ、赤色LEDが点灯状態になれば、キャリブレーションが終了です。
Note:
1.Never calibrate the compass in a strong magnetic field or near the bulk metal, such as magnetite, parking lot and buildings with underground reinforced.
2.Never carry the ferromagnetic material, such as mobile phone, with you when calibrating.
3.Take a compass calibration when the drone drifting or swinging around during the flight.
注意:
1. 強い磁場の所、磁石、地下の駐車場、鉄筋建築物のような大量の金属がある場所では、コンパスを校正することはできません。
2. キャリブレーション時に携帯電話や強磁性などの材料を持ち込んではいけません。
3. 飛行中にドローンが漂ったり揺れたりする場合は、再度コンパスの校正を行います。
3.ワン・キー・リターン:
制御不能時や低電圧時にドローンの自動復帰やワンキーリターン機能を使用すると、フロントとリアのLEDが赤く点灯し、20メートル以内にあればすぐに帰還します。ドローンが20メートル以上離れている場合は、最初に高度を25メートルまで上昇し着陸地点上空へ戻ったあと、着陸(帰還)します。帰還中にもう一度リターンボタンを長押しするとドローンが復帰しますが、低電圧で自動帰還する場合以外で可能なモードです。ドローンが帰還中は、障害物を避けるための手動操作が可能で、手動操作を停止すると帰還モードに復帰します。着陸地点は、環境によって若干の誤差が発生しますが、これは正常な現象です。
注意
.GPS信号が弱い場合、または失った場合、ドローンの緑色LEDがオレンジ色に変わるので、手動で帰還する操作する必要があります。(帰還させた後、GPS信号を取得するため)
2.ドローンが低電圧のときは、操作を停止して自動的に帰還するように制御しますが、帰還中に電池が切れた場合は、落下したり、墜落したりします。
4.低電圧保護:
ドローンの4つのインジケータLEDが赤色に変わり、フロントLEDが点滅してドローンのバッテリ電力が低いことを示し、その後帰還ポイントに戻ります。
5.過電流保護:
ドローンが異物からの直接的な衝撃に遭遇した場合、または邪魔になった場合、またはブレードが回転していない場合は、無人機は過電流保護モードに入ります。
6.レベル校正機能:
ドローンを水平面に置き、同時に左右のジョイスティックを右下隅に2〜3秒押します。
LEDが速く点滅し、約2〜3秒後に通常の状態に戻りれば レベル校正は成功です。
7.高/低速モード切替機能:
最初の電源投入時はデフォルトで低速モードです。 右ジョイスティックを短時間押して高/低速モードを切り替えることができます。 右ジョイスティックを短時間押して高速モードに切り替えるとリモコンから2回ビープ音が鳴り、高速モードに切り替わります。再度ジョイスティックを短時間押して高速モードから低速モードに切り替えると、リモコンから1回ビープ音が鳴り、低速モードになります。
8.GPS座標および航空写真:
ドローンがリターンポイントを記録し終えると、定点(単焦点)で航空写真を正確に撮ることができ、カメラは0-90度の範囲でカメラの角度を上下に調整してビデオを撮影したり録画したりできます。
広い場所では、飛行範囲は200メートル以上であり、GPS座標の限界高度は約100メートルである
9.ホバリング機能:
左のジョイスティック(スロットル)を使用して無人機の降下飛行を制御した後、
左のジョイスティック(スロットル)を離すと、ジョイスティックが離されたときにドローンがその高さでホバリングします。
10.ヘッドレス機能:
1.順方向の定義:
•リモコンの電源ボタンを押します。
•バッテリーをドローンに接続し、ドローンの電源ボタンを押すと、ドローンの方向がヘッドレスモードの新しい順方向として指定されます。
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴れば、周波数と順方向の定義され、ヘッドレス機能が設定できたことを意味します。
2.前進方向の定義のための校正:
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴ると、周波数と順方向の定義が完了したことを意味します。
ドローンがヘッドレスモードで異物と直接衝突すると、ドローンの飛行方向を補正位置に置いた後に左右のジョイスティックを同時に左下隅に押し込むだけでよい。 ドローンのインジケータLEDが点灯した後、3秒間ゆっくりと点滅すれば校正が完了したことを示します。
3ヘッドレス機能と通常機能との間のトグリング:
ドローンが対応する周波数とマッチした後、ドローンはデフォルトで通常のパターンになります。 このとき、ドローンのインジケータLEDは、点灯しています。 リモコンの右ジョイスティックを2秒間押した後、リモコンから「ビー、ビー、ビー」と音が出て、ヘッドレスモードに入ったことを示します。右ジョイスティックを2回押して (ヘッドレスモードの状態では、無人機の4つのインジケータライトが4秒に1回ゆっくりと1回ずつ)、長い「ビープ音」の音が聞こえて終了ステータスが表示されます。
•ヘッドレスモードでは、オペレータは無人機の頭部位置を区別する必要がなく、リモコンの右のジョイスティックの方向を使用してドローンの方向を正面/背面面で左右に制御するだけで済みます。



コメント 0