

Potensic T25 トイドローン(200g以下)の新製品 [ドローン]
17000円で
FHDカメラ
GPS
フォローミー
地図指定などが出来る偉いやつ。
最初の1台目には非常にいいんじゃないでしょうか。
Potensic ドローン GPS搭載 高度・座標ホバリング 1080P 120°広角HDカメラ付き フォローミーモード オートリターンモード WIFIリアタイム 国内認証済み T25
GPS搭載 高度・座標ホバリング
気圧センサーによる高度維持機能に加え、狙った位置の上空で高度・座標ホバリングができ、写真や録画には安定性が抜群です。
1080P高品質カメラ
1080P 120°広角HDカメラ付き 75°撮影角度が調整できHDカメラが搭載。写真や録画は最大1080pの高解像で記録できます(SDカードが使用する時のみ)。 スマホでのリアタイム伝送(720P)は臨場感満々の映像を楽しむことができます
操作距離と飛行時間
操作可能距離300M達して、生中継距離100~150M、飛行時間8-10分、操作の楽しさを充分楽しめます。
オートリターンモード
バッテリーの残量が不足、安全距離外、故障する時、帰還機能は自動的に起動されます。GPS機能が搭載で、地図に最後の着陸位置を示すことができ、ドローンが紛失しても、すぐ見つかります
フォローミー機能
智能跟随 フォローミー機能が有効になっていると、機体はスマホのGPSに従い、どこに行ってもフォローします。様々な角度でセルフボードレートが撮影できます
指定位置飛行
また、アプリの地図で、位置Aをタッチすると、機体は自動的に位置Aへ飛行します。スマートの飛行体験が実現できます
ご購入日から3ヶ月保証付きです。何か問題がございましたら、お気軽に連絡してください。注文履歴にアクセスし、該当する注文の右側に表示される出品者に連絡ボタンをクリックしてください。
GPS信号が弱いところ(室内など)、機体は後ろの青いライトと前の白いライトが速く点滅します。リモコンのボタン9を2~3秒間押して、GPSモードを終わります。この時、ドローンは飛行できますが、GPSに関する機能は使用できません。例えば、GPS測位機能、オートリターン、フォローミー機能など
初心者モード(アプリ操作画面の右の「三」のようなアイコンをクリックしてください)
初心者モードの場合、機体の最大飛行距離は30M、高度は30Mです。初心者モードを解除すると、機体の飛行距離と高度をお好きに調整できます(操作範囲内)。
撮影のシェア
自分で楽しめるだけでなく、写真や録画はアプリより、親友にシェアすることができます。
飛行前GPSコンパスの較正
パート1: ドローンの後部がユーザーの方を向くように拾い上げ、ドローンを水平に保ちながら360度回転させてください。
後部のLEDが青色に点灯します。
パート2:ドローンを下から持ち上げ、前部が下に向くようにしながら360度回転させてください。
前部のLEDが白く点灯します。
アプリ内のドローンの状態 :「コンパスキャリブレーションが終了しました」
パート3:GPS較正終了
ドローンを水平面に置いてください。
青色(後部)と白色(前部)のLEDが急速に点滅します。 - これはドローンがGPS較正を終了したことを意味します。*
*GPS較正を終了するには数分かかることがあります。しかも、屋内GPS信号が弱いですから、アウトドアにGPS較正と遊んた方がいいです。
アプリ内のドローンの状態 : 「GPS信号を待っています」
LEDがすべての点滅しなくなったら、ドローンは飛ぶ準備ができています!
FHDカメラ
GPS
フォローミー
地図指定などが出来る偉いやつ。
最初の1台目には非常にいいんじゃないでしょうか。
Potensic ドローン GPS搭載 高度・座標ホバリング 1080P 120°広角HDカメラ付き フォローミーモード オートリターンモード WIFIリアタイム 国内認証済み T25
GPS搭載 高度・座標ホバリング
気圧センサーによる高度維持機能に加え、狙った位置の上空で高度・座標ホバリングができ、写真や録画には安定性が抜群です。
1080P高品質カメラ
1080P 120°広角HDカメラ付き 75°撮影角度が調整できHDカメラが搭載。写真や録画は最大1080pの高解像で記録できます(SDカードが使用する時のみ)。 スマホでのリアタイム伝送(720P)は臨場感満々の映像を楽しむことができます
操作距離と飛行時間
操作可能距離300M達して、生中継距離100~150M、飛行時間8-10分、操作の楽しさを充分楽しめます。
オートリターンモード
バッテリーの残量が不足、安全距離外、故障する時、帰還機能は自動的に起動されます。GPS機能が搭載で、地図に最後の着陸位置を示すことができ、ドローンが紛失しても、すぐ見つかります
フォローミー機能
智能跟随 フォローミー機能が有効になっていると、機体はスマホのGPSに従い、どこに行ってもフォローします。様々な角度でセルフボードレートが撮影できます
指定位置飛行
また、アプリの地図で、位置Aをタッチすると、機体は自動的に位置Aへ飛行します。スマートの飛行体験が実現できます
ご購入日から3ヶ月保証付きです。何か問題がございましたら、お気軽に連絡してください。注文履歴にアクセスし、該当する注文の右側に表示される出品者に連絡ボタンをクリックしてください。
GPS信号が弱いところ(室内など)、機体は後ろの青いライトと前の白いライトが速く点滅します。リモコンのボタン9を2~3秒間押して、GPSモードを終わります。この時、ドローンは飛行できますが、GPSに関する機能は使用できません。例えば、GPS測位機能、オートリターン、フォローミー機能など
初心者モード(アプリ操作画面の右の「三」のようなアイコンをクリックしてください)
初心者モードの場合、機体の最大飛行距離は30M、高度は30Mです。初心者モードを解除すると、機体の飛行距離と高度をお好きに調整できます(操作範囲内)。
撮影のシェア
自分で楽しめるだけでなく、写真や録画はアプリより、親友にシェアすることができます。
飛行前GPSコンパスの較正
パート1: ドローンの後部がユーザーの方を向くように拾い上げ、ドローンを水平に保ちながら360度回転させてください。
後部のLEDが青色に点灯します。
パート2:ドローンを下から持ち上げ、前部が下に向くようにしながら360度回転させてください。
前部のLEDが白く点灯します。
アプリ内のドローンの状態 :「コンパスキャリブレーションが終了しました」
パート3:GPS較正終了
ドローンを水平面に置いてください。
青色(後部)と白色(前部)のLEDが急速に点滅します。 - これはドローンがGPS較正を終了したことを意味します。*
*GPS較正を終了するには数分かかることがあります。しかも、屋内GPS信号が弱いですから、アウトドアにGPS較正と遊んた方がいいです。
アプリ内のドローンの状態 : 「GPS信号を待っています」
LEDがすべての点滅しなくなったら、ドローンは飛ぶ準備ができています!
SYMA X8PROにウェアラブルカメラホルダー [ドローン]
墜落後に撮影したので、汚れています・・・

丸いところは中空のゴムでふわふわしています。

このゴムは衝撃で外れることがあるので、上下のパーツをインシュロックみたいなものではずれないように軽く固定するか、接着剤で固定していた方が良いかもしれません。
早速カメラ(A80)を取り付けてみましたが、爪が開き気味に変形していて、ぎりぎり引っかかる感じで、しっかりとは固定されていません。
若干ですが大きめな事が原因なのかも。



気になるようでしたら、A80の付属されているカメラホルダを使えばいいかもね。

ドローン(X8PRO)に取り付けて撮影してみましたが、カメラ(A80)の手ぶれ効果もあり、ブレのないきれいな動画が撮れました。
SYMA X8PRO 日本語マニュアル作成中 [ドローン]
シェアホビーさんから頂いた日本語版の取扱説明書。
http://kimyo.cocolog-nifty.com/blog/files/x8pro.pdf
英語は中学1年のDoが出てきた時から全く理解ができなくなった私。
今でも全くわかっておりませんが、文字ベースだとgoogleさんやExciteさんなど色々な翻訳サイトがあるので、なんとなくですが意味をつかむことが出来るような時代がきております。
さて、このユーザーマニュアルですが、最初から英語で作ってくれているのなら仕方ないのですが、翻訳サイトで訳しても、どうもわからない単語が出てきます。
ホバーやトイはドローンと同じ意味だと思いますが他にも
・変圧器 充電器の事なのか?
・レーザー そんな機能ないし・・・・
ひょっとすると、元々は中国語で作成した説明書を、私と同じようなレベルの人が英語に自動翻訳してわけの分からん単語が出てきているのかもしれません。
ユーザーマニュアル
主な特徴
•このドローンは、4軸構造を採用しているため、より柔軟でスピード感があり、比較的耐風性にも優れています。
大きな屋内と屋外の両方で飛行することができます。
•機体の正確な位置を確認するため6軸ジャイロスタビライザを内蔵。
•モジュール式の設計構造を採用しているため、組み立てと修理が容易です。
•屋外GPS固定ポイント、ワンキーリターン、ドローンが制御不能または低電圧に自動帰還、ワンキーで離陸/着陸、ヘッドレスモード、気圧固定高度、4ch機能 上昇/下降、左/右、前/後、左/右回転)。
•ヘッドレス機能により、方向制御が容易。
•NEW GPS固定ポイント機能。
•NEW 航空写真用のカメラ回転機能。
•今までとは違う写真撮影の楽しみを得るためのHDワイヤレスリアルタイム伝送アンテナ。
MAIN FEATURES
• Utilizes the 4-axis structure, enabling the drone to be even more flexible, speedy,and possessing a relatively stronger wind-withstanding capability. It can fly both in large indoor spaces and outdoors.
• Built-in 6-axis gyro stabilizer to ensure accurate positioning in-flight.
• the structure uses a modular design which makes it easy to install and repair.
• With the functions of outdoor GPS fixed-point, one key return, auto return when the drone is out of control or in low-voltage, one key ascent/descent,headless mode, air pressure fixed altitude and 4-channel function up/down,turn left/right, forward/backward, left/right side flight).
• Headless function making it easy for directional control.
• New GPS fixed-point function.
• New camera rotation function for aerial photography.
• HD wireless real-time transmission aerial for getting the fun of different photography.
安全ガイド
1.子供の手の届かない場所にドローンの小さな部品を保管してください。
このドローンは非常に強力です。すべての初回飛行では、不要な衝突・損傷や怪我を避けるために、ドローンが急上昇しないように、左ジョイスティックをゆっくりと操作(押し上げる)必要があります。
3.飛行が終了したら、まずリモコンの電源を切ります。その後ドローンの電源を切ります。
4.高温の場所に電池を置き熱にさらさないでください。
5.飛行中に身体を傷つけないように、ドローンが操縦者や他の人、動物から15ft (約5m)以上の距離にあることを確認し十分な予防措置を講じる必要があります。
また、通常の使用状態では、操縦者とドローン本体の間に20cm以上の距離を維持する必要があります。
6.このドローンは14歳以上に適応した商品です。操縦者(または指導者)の視界内を常に飛行させ、かつ安全に飛行させなければなりません。
7.非充電式電池は充電しないでください。電池は正しい極性で挿入してください。異なる種類の電池または新品および使用済みの電池は混合しないでください。
8.ドローンが使用されていないときは、リモコンの電池を取り外してください。
9.電源端子が短絡していないこと。
10. 10日以上使用しない場合は、バッテリーを40%〜50%に放電してください(フル充電では、飛行時間の半分を飛ばしてください)。
11.怪我を避けるため、回転するプロペラから安全な距離を保つようにしてください。
空港の滑走路の中心から約5000mの半径にあるゾーン内のリモコンを使用して、航空無線機(ステーション)の電磁環境要件を確保することは禁じられています。
すべてのユーザーはまた、期間および地域を含む政府および規制当局によって設定されたラジオの規制。
13.モデルには推奨充電器のみを使用し、異なるモデルの充電器は使用できません。
【充電器をクリーニングする前に液体でクリーニングできるモデルから外します。】ここがわかんねえ
充電器のコード、プラグ、外装、その他の部品を定期的に点検してください。
損傷が発見された場合は、完全に修復されるまで、すぐに使用を中止してください。
14.【レーザー照射後は、レーザー光線を直接に見てはならない。】ここも意味がわかりません
15.注意:大人の監督下でのドローン組み立てること。
16.操縦者は、飛行に関係ない人や他の空域ユーザーへの安全な操作と安全な距離の責任を負い、ドローンを決して群衆の上(12人以上)で飛行させてはならない。
17.送信機のバッテリーカバーをドライバーで開けます。
18.重要な情報が含まれているので、梱包は保管しておく必要があります。
Sefety Guide
1.Please store the smaller-sized drone accessories in places that are out of reach of children.
2.This drone is very powerful. For all first-time flights, the left joystick must be slowly pushed up in order to prevent the drone from ascending too fast to avoid unnecessary collision and possible damage and injury.
3.When the flight is ended, first turn off the power of the remote control. Then turn off the power of the drone.
4.Avoid placing the batteries in places with high temperatures and xposure to heat.
5.Take extra precaution to ensure that the drone is at a minimum distance of 15 feet from the pilot, other people, and animals in order to prevent bodily injury during flight operation. A minimum separation distance of 20 cm must be maintained between the user's body and the device under normal use condition.
6.This drone is for people ages 14+. It must be flown always within the line of sight of the pilot (or instructor) and flown safely.
7.Non-rechargeable batteries are not to be recharged; Batteries are to be inserted with the correct polarity; Different types of batteries or new and used batteries are not be mixed.
8.When the drone is not in use, please remove the batteries in the remote control.
9.The supply terminals are not be short-circuited.
10.Discharge the battery to 40%-50% (On a full charge, fly for half of the total flight time) if it will not be used for 10 days or more, this can greatly extend the battery life.
11.Please keep a safe distance from the spinning propellers to avoid injury.
12.To ensure the electromagnetic environment requirement of the aviation radio (station), using remote controls in the zone, which is in a radius of about 5000m zone from the circle center of the airport runway, is forbidden.All users also should abide by the regulation of the radio set forth by government and regulatory agencies including the duration and area.
13.Only uses the recommended transformer for the model, and the transformer is not a model. Disconnect the transformer from the model which is available cleaning with liquids before cleaning. Check the cord, plug, enclosure and other parts of the transformer regularly. If any damages have been discovered, please immediately stop using it, until it was completely repaired.
14.Never look steadily at the laser beam since the laser radiation.
15.Attention: Drone assembly under adult supervision.
16.The pilot is responsible for the safe operation and safe distance from uninvolved persons and property on the ground and from other airspace users and shall never fly the drone above crowds(> 12 persons).
17.Open the battery cover of the toy with screwdriver.
18.The packing has to be kept since it contains important information.
フライト条件
1.風雨、雪、雨、霧などの悪天候で飛行させないでください。
2.周囲に高層ビルがない広い場所で飛行させてください。
鉄筋の建物はGPS信号とコンパス動作を制限し、機体の位置が確定できなくなり、機体が不安定になります。
3.有視界内でドローンを飛行させ、障壁、群衆、水から遠く離れた場所で飛ばしてください。
4.高圧電線、携帯基地局または発射台から離れてください。空港または飛行禁止エリアの近くでは絶対に飛行させないでください。
5.ドローンは、極圏(北極・南極?)では通常のように飛ばすことができません。
Flight Conditions
1. Do not fly in bad weather,such as windy,snowy, rainy or foggy.
2. Fly in the place where is a wide open area with no tall buildings around.
The buildings with structural steel will limit the compass work and signal of GPS, and lead to bad positioning even fail to determine position.
3.Keep flying the drone within your line-of-sight, and far away from barriers,crowd and water.
4.Keep away from the high voltage cable, base station or launch tower, and never fly in the area near the airport or no-fly area.
5.The drone can not fly as normal in the polar circles.
修理と点検
1.本製品は乾いた柔らかい布で清掃してください。
2.本製品を熱にさらさないでください。
3.本製品を水に浸さないでください。電子部品が破損する恐れがあります。
4.ドローンに使用される充電器は、コード、プラグ、外装(筐体)および他の部品に損傷が無いか定期的に検査する必要があります。損傷があった場合は、損傷が修復されるまで、【この充電器を使用する必要があります。】ここもわかりません。
Repair and Maintenance
1. Use dry and soft cloth to clean this product.
2. Avoid exposing this product to heat.
3. Do not immerse this product in water, otherwise, the electronic parts will be damaged.
4.Transformers used with the toy are to be regularly examined for damage to the cord, plug,enclosure and other parts,and that, in the event of such damage,the toys must be used with this transformer until the damage has been repaired.
パッケージの説明
この製品パッケージには、次の内容があります。
•ドローン
•リモコン
•ユーザーマニュアル
•ドライバー
•メモリカードリーダー
•ブレード
•スマートフォン用クリップホルダー
•ブレードガード
•充電器
•レンチ
720Pカメラ
(メモリカードはオプション)
Package Description
The following items can be found in this product package:
•Drone
•Remote Control
•User Manual
•Screwdriver
•Card Reader
•Blades
•Mobile Phone Retaining Clip
• Protective Gear
•Charger
•Wrench
• 720P Camera
(memory card is optional)
保護装置(ブレードガード)の取り付けと分解方法
Protective Gear's Installation and Dismantling Methods
保護部品(ブレードガード)の取り付け:
保護部品(ブレードガード)を図のようにドローンに挿入します。
Installation of protective gear:
Insert the protective gear
into the drone as shown.
保護部品(ブレードガード)の取り外し:
図のようにロックレバー上向きに押しながら保護部品(ブレードガード)を取り外します。
Dismantling of protective gear:
Press the protective gear
upward and pull out at the
same time as shown.
ブレードの設置と分解方法
Blade's Installation and Dismantling Methods
ブレードの取り付け:
Installation of blade:
1.図のようにブレードを挿入します。
1. Insert the blade as shown.
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。次に
ブレードAを軸に押しつけながら、ブレードを反時計方向に回してロックします。
ブレードBは時計回りに回してロックします。
2. Use a wrench to fasten the hexagonal nut under the base of the main axis,then press blade A onto the axis. Turn the blade counterclockwise to lock it in.
Blade B is locked in by turning it clockwise.
3.図のようにブレードカバーを取り付けます。
3. Attach blade cover as shown.
ブレードの取り外し:
Dismantling of blade:
1.図のようにブレードカバーを取り外します。
1. Remove the blade cover as shown.
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。
次にブレードAを軸に押し付けながら、ブレードを時計回りに回して緩めます。
ブレードBは反時計回りに回して緩めます。
2. Use a wrench to fasten the hexagonal nut under the base of the main axis, then press blade A onto the axis. Turn the blade clockwise to loosen it.
Blade B is loosened by turning it counter-clockwise.
3.ブレードを取り外します。
3. Remove the blade.
カメラの設置方法と解体方法
Camera's Installation and Dismantling Methods
カメラの取り付け手順:
Installation steps for camera
1.接続部にカメラを置き、図のように押します。
(説明書が違う。接続部にカメラをスライド(←向き)させ取り付けます。)
1. Aim the camera at the interface and push it as shown.
2.図のようにカメラのケーブルをソケットに接続します。
2. Connect the camera cable into the socket as shown.
カメラの取り外し手順:
Dismantling steps for camera
1.図のようにカメラのケーブルをソケットから引き抜きます。
1. Pull out the camera cable from the socket as shown.
2.ロックボタンを押しながらカメラをスライドさせ取り外します。
2. Press the camera locked button and pull camera out at the same time.
スマートフォンクリップホルダーの取り付け方法と分解方法
Installation and Dismantling Methods of Mobile Phone Retaining Clip
スマートフォンクリップホルダーの取り付け方法:
Mobile phone retaining clip's attachment method:
1.リモコンの上部の接続部にスマートフォンのクリップホルダーを差し込みます。
1.insert the phone clip holder into the connector at the top of the remote control.
2.ハンドルを押しクリップの開き方を調整してスマートフォンをはさみます。
2.Press the handles to adjust the jaws.
ドローンのバッテリー交換と充電方法
Battery Changing and Charging Methods for Drone
1.ドローンの電源ボタンを押して電源を切ってください。
1.Press the power button of the drone to turn it off.
2.バッテリーの底にあるロックボタンを押しながらバッテリーを引き抜きます。
2.Press the fixed components at the bottom of the battery and pull out the battery.
3.充電器のプラグをバッテリーのポートに接続し、充電器をコンセントに接続します。 充電中はインジケーターランプが赤く点灯し、充電が完了すると緑色に変わります。 バッテリーを完全に充電するのに150分かかります。
3. Connect the plug from the charger into the port in the battery, then connect the charger into the charging cradle. The indicator light will turn red while charging and turn green when charging is complete. It takes 150 minutes to completely charge the battery.
4.バッテリーが完全に充電されたら、バッテリーをドローンに戻します。
4. After the battery is fully charged, put the the battery back into the drone.
充電時間は約150分です。 浮上飛行時間は約9分です。
The charging time is about 150 minutes; Hover flight time is approximately 9 minutes.
バッテリの充電中に以下の注意事項があります。
- 充電済みのバッテリーを、直射日光や高温の場所に置かないでください。
火花がでたり、多くの場合設置している電気機器の損傷や爆発の原因となります。
- 電池を水に浸しないようにしてください。
電池は涼しく乾燥した場所に入れてください。
- バッテリーを分解しないでください。
- バッテリーの充電中に充電場所を離れることは避けてください。
充電する前に充電式電池を取り出してください。
- 充電式電池は、大人の監督下でのみ充電してください。
- 消耗したバッテリーは、ドローンから取り外す必要があります。
- 注意:電池を誤ったタイプに交換した場合、爆発の危険性がありますので、使用済みの電池は取扱説明書に従って廃棄してください。
Precautions as follows during charging of battery:
- Avoid placing the active batteries in places with direct posure,sunlight and high temperatures. For example, naked light or electrical equipment installations; otherwise it may cause damages or explosions.
- Avoid immersing the batteries in the water. The batteries shall be tored in a cool and dry place.
- Avoid dismantling the batteries.
- During the charging of battery, avoid leaving the charging place.
- Rechargeable batteries are to be removed from the toy before being charged.
- Rechargeable batteries are only to be charged under adult supervision.
- Exhausted batteries are to be removed from the toy.
- Caution: Risk of explosion if battery replaced by an incorrect type, dispose of used batteries according to the instructions.
中略
1.操作方法:
1.0peration Instructions:
①.最初に飛行に必要な安全な広い場所を見つける。
①.Find a wide place for flying.
②.ドローンにバッテリを取り付け、ドローンの先端を手前に向け水平に置き、電源ボタンを2秒間押してから離します。リモコンの電源を入れ、リモコンの左ジョイスティックを上に上げ、下に下ろします。リモコンが2回ビーと鳴り、ドローンのインジケータLEDが点滅後、点灯になれば、信号の接続が完了です。
(最初の飛行の前にコンパスを調整してください。)
②.Install the battery in the drone, and place it on a level surface with the nose of the drone face forward, press the power button for 2 seconds and then release. Power on the remote control, push the throttle joystick of the remote control up to the top and then down to the bottom.When the remote control beeps twice and the indicator light of the drone turns to solid from blink, signal connection completed.(Piease do calibrate the compass before the first flight.)
③.ドローンの後部LEDは、最初は橙色で、約1分後に緑色に点滅し、GPS信号の検索が終了します。 15秒後に飛行に十分なGPS信号が捕捉されると、緑色に点滅するLEDが点灯に変り、ドローンがGPS機能で飛行できることを示します。
③.The rear lights of the drone begin as solid orange, and turn to blink green about 1 minute later when finish the satellite signal searching. After 15 seconds, the blink green lights change to solid green, that indicates there are enough GPS points recorded successfully, and the drone is able to fly with GPS coordinates function.
④.左ジョイスティックを右下に、右ジョイスティックを左下に同時に押し込むか、左ジョイスティックを上に押してから中央に戻すと、ドローンのプロペラがゆっくりと回転し、ドローンの飛ぶ準備ができていることが示されます。
④.Push the left joystick to the right-bottom and the right joystick to the left-bottom simultaneously,or push the left joystick upward and then back to the midpoint, the propellers of the drone rotating slowly indicate the drone is ready to fly.
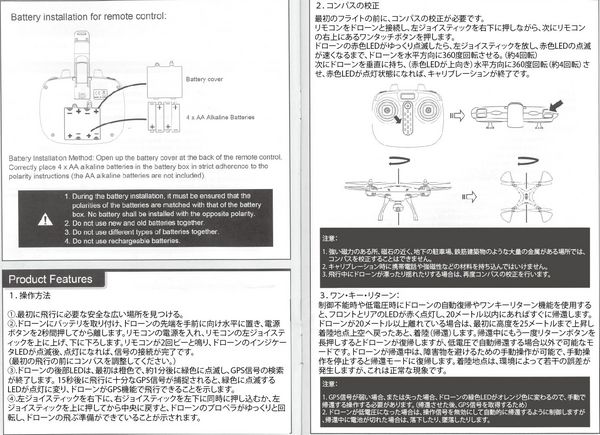
2.コンパスの校正:
2.Compass Calibration:
最初のフライトの前に、コンパスの校正が必要です。
リモコンをドローンと接続し、左ジョイスティックを右下に押しながら、次にリモコンの右上にあるワンタッチボタンを押します。
ドローンの赤色LEDがゆっくり点滅したら、左ジョイスティックを放し、赤色LEDの点滅が速くなるまで、ドローンを水平方向に360度回転させる。(約4回転)
次にドローンを垂直に持ち、(赤色LEDが上向き)水平方向に360度回転(約4回転)させ、赤色LEDが点灯状態になれば、キャリブレーションが終了です。
Before the first flight, the compass calibration is required. When the remote control has connected to the drone, push the left joystick to the right bottom corner and hold it, then press the One key return button located at the upper right corner of the remote control. When the red indicator lights flash slowly, release the left joystick and hold the drone horizontally and rotate 360 degrees till the red indicators of the drone turn to fast flashing(approx 4 circles). Hold the drone vertically, (with the red indicators pointing upward) and rotate it 360 degrees till the indicators turn to long bright (approx 4 circles),the calibration finished.
注意:
1. 強い磁場の所、磁石、地下の駐車場、鉄筋建築物のような大量の金属がある場所では、コンパスを校正することはできません。
2. キャリブレーション時に携帯電話や強磁性などの材料を持ち込んではいけません。
3. 飛行中にドローンが漂ったり揺れたりする場合は、再度コンパスの校正を行います。
Note:
1.Never calibrate the compass in a strong magnetic field or near the bulk metal, such as magnetite, parking lot and buildings with underground reinforced.
2.Never carry the ferromagnetic material, such as mobile phone, with you when calibrating.
3.Take a compass calibration when the drone drifting or swinging around during the flight.
3.ワン・キー・リターン:
3.0ne Key Return:
制御不能時や低電圧時にドローンの自動復帰やワンキーリターン機能を使用すると、フロントとリアのLEDが赤く点灯し、20メートル以内にあればすぐに帰還します。ドローンが20メートル以上離れている場合は、最初に高度を25メートルまで上昇し着陸地点上空へ戻ったあと、着陸(帰還)します。帰還中にもう一度リターンボタンを長押しするとドローンが復帰しますが、低電圧で自動帰還する場合以外で可能なモードです。ドローンが帰還中は、障害物を避けるための手動操作が可能で、手動操作を停止すると帰還モードに復帰します。着陸地点は、環境によって若干の誤差が発生しますが、これは正常な現象です。
When use the one key return function or the drone auto return when it is out of control or in low-voltage, the front and rear lights turn red, and the drone will return home immediately if it at the range of 20 meters, if the drone is beyond the the range of 20 meters, it will ascend at about 25 meters altitude first, then return home, and the drone will back to the record point at last. long press the one key return button again,the drone will exit return mode except it is auto return with low-voltage. When the drone returns home, manual operation to avoid obstacle is allowed, and it will continue to return if stopped manual operation. The return point will be a little errors cause by the environment, it's a normal phenomenon.
注意
.GPS信号が弱い場合、または失った場合、ドローンの緑色LEDがオレンジ色に変わるので、手動で帰還する操作する必要があります。(帰還させた後、GPS信号を取得するため)
2.ドローンが低電圧のときは、操作を停止して自動的に帰還するように制御しますが、帰還中に電池が切れた場合は、落下したり、墜落したりします。
Note:
1.When the GPS signal is weak or not work, the green light of the drone will turn orange, and it will fail to return home and get the GPS coordinates, and it need to be controlled to return home manually.
2.When the drone is low-voltage, stop other operation and control it to return, otherwise, it will fall down or crash when over low-voltage.
4.低電圧保護:
4. Low-Voltage Protection:
ドローンの4つのインジケータLEDが赤色に変わり、フロントLEDが点滅してドローンのバッテリ電力が低いことを示し、その後帰還ポイントに戻ります。
When the four indicator lights of the drone located the bottom turn red, and the front lights begin to blink, indicating the battery power of the drone is low, and it will return to the record point.
5.過電流保護:
5. Over-Current Protection:
ドローンが異物からの直接的な衝撃に遭遇した場合、または邪魔になった場合、またはブレードが回転していない場合は、無人機は過電流保護モードに入ります。
If the drone encounters a direct impact from a foreign object, or is obstructed, or if the blades are not rotating, the drone will go into over-current protection mode.
6.レベル校正機能:
6. Level Calibration Function:
ドローンを水平面に置き、同時に左右のジョイスティックを右下隅に2〜3秒押します。
LEDが速く点滅し、約2〜3秒後に通常の状態に戻りれば レベル校正は成功です。
Place the drone on a level surface and at the same time, push both left and right joysticks to the lower right corners for 2 to 3 seconds; the led light indicator on the drone will blink rapidly, and it will return back to the normal status after about 2 to 3 seconds. The level calibration is successful.
7.飛行速度の高/低速モード切替機能:
7.High/Low Speed Function:
最初の電源投入時はデフォルトで低速モードです。 右ジョイスティックを短時間押して高/低速モードを切り替えることができます。 右ジョイスティックを短時間押して高速モードに切り替えるとリモコンから2回ビープ音が鳴り、高速モードに切り替わります。再度ジョイスティックを短時間押して高速モードから低速モードに切り替えると、リモコンから1回ビープ音が鳴り、低速モードになります。
Low speed by default when first powered-on.
Possible to switch the function mode of high/low speed by pressing the right joystick for a short time. It is switched into high speed mode when two "beep" sounds come from the remote control, pressing the right joystick for a short time under fast speed mode and then one"beep" sound would come from the remote control, then it is switched back into low speed mode.
8.GPS座標および航空写真:
8.GPS Coordinates & Aerial Photography:
ドローンがリターンポイントを記録し終えると、定点(単焦点)で航空写真を正確に撮ることができ、カメラは0-90度の範囲でカメラの角度を上下に調整してビデオを撮影したり録画したりできます。
After the drone complete recording the return point, it can take an aerial photography at the fixed point accurately, the camera will able to take the photo or record the video with adjusting the camera angle up and down at the range of 0-90 degree.
広い場所では、飛行範囲は200メートル以上であり、GPS座標の限界高度は約100メートルである
In the wide place, the flying range is more than 200 meters,and the L1m1t height of the GPS coordmates is about 100 meters.
9.ホバリング機能:
9. Auto Hover Function:
左のジョイスティック(スロットル)を使用して無人機の降下飛行を制御した後、
左のジョイスティック(スロットル)を離すと、ジョイスティックが離されたときにドローンがその高さでホバリングします。
After using the left joystick (throttle) to control the ascending I descending flight of the drone, release the left joystick (throttle) and the drone will hover at that height when the joystick is released .
10.ヘッドレス機能:
10.Headless Function :
①.順方向の定義:
①Defining forward direction:
•リモコンの電源ボタンを押します。
• Press on the power button of the remote control.
•バッテリーをドローンに接続し、ドローンの電源ボタンを押すと、ドローンの方向がヘッドレスモードの新しい順方向として指定されます。
•Connect the battery to the drone, press the power button of the drone, and adjust the specified direction of the drone's head under the headless mode as the new forward direction.
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴れば、周波数と順方向の定義され、ヘッドレス機能が設定できたことを意味します。
• Push the left joystick (throttle) on the remote control up to the farthest position and then pull down to the farthest position. When the remote control issues a long beep sound, it means the frequency and
defining forward direction functions are completed.
②.前進方向の定義のための校正:
②Calibration for the definition of the front:
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴ると、周波数と順方向の定義が完了したことを意味します。
ドローンがヘッドレスモードで異物と直接衝突すると、ドローンの飛行方向を補正位置に置いた後に左右のジョイスティックを同時に左下隅に押し込むだけでよい。 ドローンのインジケータLEDが点灯した後、3秒間ゆっくりと点滅すれば校正が完了したことを示します。
When the drone encounters a direct impact with foreign objects in the headless mode, if there is an occurrence of deviation of the defined direction, it is only required to push both the left and right joysticks to the bottom left corners simultaneously after placing the flying direction of the drone in the correction position. When the LED indicator of the drone turn to solid after slowly flashing for 3 seconds, it indicates the calibration is complete.
③ヘッドレス機能と通常機能との間のトグリング:
③Toggling between headless function and normal function:
・ドローンが対応する周波数とマッチした後、ドローンはデフォルトで通常のパターンになります。 このとき、ドローンのインジケータLEDは、点灯しています。 リモコンの右ジョイスティックを2秒間押した後、リモコンから「ビー、ビー、ビー」と音が出て、ヘッドレスモードに入ったことを示します。右ジョイスティックを2回押して (ヘッドレスモードの状態では、無人機の4つのインジケータライトが4秒に1回ゆっくりと1回ずつ)、長い「ビープ音」の音が聞こえて終了ステータスが表示されます。
•After the drone is matched with the corresponding frequency, the drone would be in normal pattern by default. At this time the indicator light on the drone would be in a state of on for a long time. After pressing in on the right joystick of the remote control for 2 seconds, the remote control would make a sound of "beep, beep, beep" to show that it has entered into a state of headless mode.Pressing in on right joystick for 2 seconds then a long sound of "beep" would be heard to show an exit status.(When under the state of headless mode, four indicator lights on the drone flash slowly once every four seconds).
•ヘッドレスモードでは、オペレータは無人機の頭部位置を区別する必要がなく、リモコンの右のジョイスティックの方向を使用してドローンの方向を正面/背面面で左右に制御するだけで済みます。
•Under the headless mode, the operator does not need to differentiate the head position of the drone, and only needs to control the drone's direction front/back/left/right by using the right joystick direction on the remote control.
中略
復旧手順(トラブル発生時)
Rectification Procedures
問題・症状:
ドローンの応答がありません
原因:
1.ドローンが低電圧保護に入った。
2.リモコンの電池が少ないときは、電源ランプが点滅します。
解決方法:
1.ドローンを充電する。
2.リモコンの電池を交換する。
問題・症状:
ドローンの飛行応答は敏感ではない
理由:
1.リモコンの電池が少ない。
2.リモコンと同じ周波数の干渉があります。
解決方法:
1.電池を交換します。
2.同じ周波数の干渉しない場所に変更します。
問題・症状:
ドローンがホバリング中に一方向にずれて飛んでいく。
理由:
1.ドローンが地面に対して校正されていません。
解決方法:
1.ドローンが地面と水平になるまで校正を再調整します。
詳細は、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
問題・症状:
ヘッドレスモードで、前方向に偏る。
理由:
1.多くの場合、衝突が原因でヘッドドリフトを引き起こす可能性があります。
解決方法:
1.正面方向を再定義します。詳細は、9ページのNo.10(ヘッドレス機能)を参照してください。
問題・症状:
上下にふらつく/激しく不安定な飛行
理由:
1.ドローンが地面に対して校正されていません。
2.厳しい気象条件で気圧が不安定になっている。
3.激しい衝突により、ジャイロスコープのデータが乱れている。
解決方法:
1.ドローンが地面と水平になるまで校正を再調整します。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
2.厳しい気象条件下での飛行は避けてください。
3.レベル調整をもう一度行います。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
Rectification Procedures
The drone has no response
1. The drone has entered into lowvoltage protection.
2. When the power of the remote control is weak, the power light indicator will blink.
1. Charge up the drone.
2. Change the batteries of the remote control.
The flight response of the drone is not sensitive
1. The power of the remote control is weak.
2. There is an interference with the same frequency as that of the remote control.
1. Change the batteries.
2. Change to a place where there is no interference with the same frequency.
The drone is flying towards its side in one direction during hovering
1. The drone is not calibrated level to the ground.
1. Re-adjust the calibration until the aircraft is level to the ground. For further details, see No.6 on Page8 for details (Level calibration function).
In the headless state, it is biased towards the front direction
1. Many collisions may cause head drift.
1.Re-define the front direction. For further details, see No. 10 on Page 9 for details (Headless function).
Fixed high instability/up and down movement
1. The drone is not calibrated level to the ground.
2. Unstable air pressure under the severe weather condition.
3. Violent collision resulting in data disorder of gyroscope.
1.Re-adjust the calibration until the drone is level to the ground. For further details, see No.6 on Page 8 for details(Level calibration function).
2.Avoid to fty under the severe weather condition.
3.Make level adjustment again, see No.6 on Page 8 for details (Level calibration function).
http://kimyo.cocolog-nifty.com/blog/files/x8pro.pdf
英語は中学1年のDoが出てきた時から全く理解ができなくなった私。
今でも全くわかっておりませんが、文字ベースだとgoogleさんやExciteさんなど色々な翻訳サイトがあるので、なんとなくですが意味をつかむことが出来るような時代がきております。
さて、このユーザーマニュアルですが、最初から英語で作ってくれているのなら仕方ないのですが、翻訳サイトで訳しても、どうもわからない単語が出てきます。
ホバーやトイはドローンと同じ意味だと思いますが他にも
・変圧器 充電器の事なのか?
・レーザー そんな機能ないし・・・・
ひょっとすると、元々は中国語で作成した説明書を、私と同じようなレベルの人が英語に自動翻訳してわけの分からん単語が出てきているのかもしれません。
ユーザーマニュアル
主な特徴
•このドローンは、4軸構造を採用しているため、より柔軟でスピード感があり、比較的耐風性にも優れています。
大きな屋内と屋外の両方で飛行することができます。
•機体の正確な位置を確認するため6軸ジャイロスタビライザを内蔵。
•モジュール式の設計構造を採用しているため、組み立てと修理が容易です。
•屋外GPS固定ポイント、ワンキーリターン、ドローンが制御不能または低電圧に自動帰還、ワンキーで離陸/着陸、ヘッドレスモード、気圧固定高度、4ch機能 上昇/下降、左/右、前/後、左/右回転)。
•ヘッドレス機能により、方向制御が容易。
•NEW GPS固定ポイント機能。
•NEW 航空写真用のカメラ回転機能。
•今までとは違う写真撮影の楽しみを得るためのHDワイヤレスリアルタイム伝送アンテナ。
MAIN FEATURES
• Utilizes the 4-axis structure, enabling the drone to be even more flexible, speedy,and possessing a relatively stronger wind-withstanding capability. It can fly both in large indoor spaces and outdoors.
• Built-in 6-axis gyro stabilizer to ensure accurate positioning in-flight.
• the structure uses a modular design which makes it easy to install and repair.
• With the functions of outdoor GPS fixed-point, one key return, auto return when the drone is out of control or in low-voltage, one key ascent/descent,headless mode, air pressure fixed altitude and 4-channel function up/down,turn left/right, forward/backward, left/right side flight).
• Headless function making it easy for directional control.
• New GPS fixed-point function.
• New camera rotation function for aerial photography.
• HD wireless real-time transmission aerial for getting the fun of different photography.
安全ガイド
1.子供の手の届かない場所にドローンの小さな部品を保管してください。
このドローンは非常に強力です。すべての初回飛行では、不要な衝突・損傷や怪我を避けるために、ドローンが急上昇しないように、左ジョイスティックをゆっくりと操作(押し上げる)必要があります。
3.飛行が終了したら、まずリモコンの電源を切ります。その後ドローンの電源を切ります。
4.高温の場所に電池を置き熱にさらさないでください。
5.飛行中に身体を傷つけないように、ドローンが操縦者や他の人、動物から15ft (約5m)以上の距離にあることを確認し十分な予防措置を講じる必要があります。
また、通常の使用状態では、操縦者とドローン本体の間に20cm以上の距離を維持する必要があります。
6.このドローンは14歳以上に適応した商品です。操縦者(または指導者)の視界内を常に飛行させ、かつ安全に飛行させなければなりません。
7.非充電式電池は充電しないでください。電池は正しい極性で挿入してください。異なる種類の電池または新品および使用済みの電池は混合しないでください。
8.ドローンが使用されていないときは、リモコンの電池を取り外してください。
9.電源端子が短絡していないこと。
10. 10日以上使用しない場合は、バッテリーを40%〜50%に放電してください(フル充電では、飛行時間の半分を飛ばしてください)。
11.怪我を避けるため、回転するプロペラから安全な距離を保つようにしてください。
空港の滑走路の中心から約5000mの半径にあるゾーン内のリモコンを使用して、航空無線機(ステーション)の電磁環境要件を確保することは禁じられています。
すべてのユーザーはまた、期間および地域を含む政府および規制当局によって設定されたラジオの規制。
13.モデルには推奨充電器のみを使用し、異なるモデルの充電器は使用できません。
【充電器をクリーニングする前に液体でクリーニングできるモデルから外します。】ここがわかんねえ
充電器のコード、プラグ、外装、その他の部品を定期的に点検してください。
損傷が発見された場合は、完全に修復されるまで、すぐに使用を中止してください。
14.【レーザー照射後は、レーザー光線を直接に見てはならない。】ここも意味がわかりません
15.注意:大人の監督下でのドローン組み立てること。
16.操縦者は、飛行に関係ない人や他の空域ユーザーへの安全な操作と安全な距離の責任を負い、ドローンを決して群衆の上(12人以上)で飛行させてはならない。
17.送信機のバッテリーカバーをドライバーで開けます。
18.重要な情報が含まれているので、梱包は保管しておく必要があります。
Sefety Guide
1.Please store the smaller-sized drone accessories in places that are out of reach of children.
2.This drone is very powerful. For all first-time flights, the left joystick must be slowly pushed up in order to prevent the drone from ascending too fast to avoid unnecessary collision and possible damage and injury.
3.When the flight is ended, first turn off the power of the remote control. Then turn off the power of the drone.
4.Avoid placing the batteries in places with high temperatures and xposure to heat.
5.Take extra precaution to ensure that the drone is at a minimum distance of 15 feet from the pilot, other people, and animals in order to prevent bodily injury during flight operation. A minimum separation distance of 20 cm must be maintained between the user's body and the device under normal use condition.
6.This drone is for people ages 14+. It must be flown always within the line of sight of the pilot (or instructor) and flown safely.
7.Non-rechargeable batteries are not to be recharged; Batteries are to be inserted with the correct polarity; Different types of batteries or new and used batteries are not be mixed.
8.When the drone is not in use, please remove the batteries in the remote control.
9.The supply terminals are not be short-circuited.
10.Discharge the battery to 40%-50% (On a full charge, fly for half of the total flight time) if it will not be used for 10 days or more, this can greatly extend the battery life.
11.Please keep a safe distance from the spinning propellers to avoid injury.
12.To ensure the electromagnetic environment requirement of the aviation radio (station), using remote controls in the zone, which is in a radius of about 5000m zone from the circle center of the airport runway, is forbidden.All users also should abide by the regulation of the radio set forth by government and regulatory agencies including the duration and area.
13.Only uses the recommended transformer for the model, and the transformer is not a model. Disconnect the transformer from the model which is available cleaning with liquids before cleaning. Check the cord, plug, enclosure and other parts of the transformer regularly. If any damages have been discovered, please immediately stop using it, until it was completely repaired.
14.Never look steadily at the laser beam since the laser radiation.
15.Attention: Drone assembly under adult supervision.
16.The pilot is responsible for the safe operation and safe distance from uninvolved persons and property on the ground and from other airspace users and shall never fly the drone above crowds(> 12 persons).
17.Open the battery cover of the toy with screwdriver.
18.The packing has to be kept since it contains important information.
フライト条件
1.風雨、雪、雨、霧などの悪天候で飛行させないでください。
2.周囲に高層ビルがない広い場所で飛行させてください。
鉄筋の建物はGPS信号とコンパス動作を制限し、機体の位置が確定できなくなり、機体が不安定になります。
3.有視界内でドローンを飛行させ、障壁、群衆、水から遠く離れた場所で飛ばしてください。
4.高圧電線、携帯基地局または発射台から離れてください。空港または飛行禁止エリアの近くでは絶対に飛行させないでください。
5.ドローンは、極圏(北極・南極?)では通常のように飛ばすことができません。
Flight Conditions
1. Do not fly in bad weather,such as windy,snowy, rainy or foggy.
2. Fly in the place where is a wide open area with no tall buildings around.
The buildings with structural steel will limit the compass work and signal of GPS, and lead to bad positioning even fail to determine position.
3.Keep flying the drone within your line-of-sight, and far away from barriers,crowd and water.
4.Keep away from the high voltage cable, base station or launch tower, and never fly in the area near the airport or no-fly area.
5.The drone can not fly as normal in the polar circles.
修理と点検
1.本製品は乾いた柔らかい布で清掃してください。
2.本製品を熱にさらさないでください。
3.本製品を水に浸さないでください。電子部品が破損する恐れがあります。
4.ドローンに使用される充電器は、コード、プラグ、外装(筐体)および他の部品に損傷が無いか定期的に検査する必要があります。損傷があった場合は、損傷が修復されるまで、【この充電器を使用する必要があります。】ここもわかりません。
Repair and Maintenance
1. Use dry and soft cloth to clean this product.
2. Avoid exposing this product to heat.
3. Do not immerse this product in water, otherwise, the electronic parts will be damaged.
4.Transformers used with the toy are to be regularly examined for damage to the cord, plug,enclosure and other parts,and that, in the event of such damage,the toys must be used with this transformer until the damage has been repaired.
パッケージの説明
この製品パッケージには、次の内容があります。
•ドローン
•リモコン
•ユーザーマニュアル
•ドライバー
•メモリカードリーダー
•ブレード
•スマートフォン用クリップホルダー
•ブレードガード
•充電器
•レンチ
720Pカメラ
(メモリカードはオプション)
Package Description
The following items can be found in this product package:
•Drone
•Remote Control
•User Manual
•Screwdriver
•Card Reader
•Blades
•Mobile Phone Retaining Clip
• Protective Gear
•Charger
•Wrench
• 720P Camera
(memory card is optional)
保護装置(ブレードガード)の取り付けと分解方法
Protective Gear's Installation and Dismantling Methods
保護部品(ブレードガード)の取り付け:
保護部品(ブレードガード)を図のようにドローンに挿入します。
Installation of protective gear:
Insert the protective gear
into the drone as shown.
保護部品(ブレードガード)の取り外し:
図のようにロックレバー上向きに押しながら保護部品(ブレードガード)を取り外します。
Dismantling of protective gear:
Press the protective gear
upward and pull out at the
same time as shown.
ブレードの設置と分解方法
Blade's Installation and Dismantling Methods
ブレードの取り付け:
Installation of blade:
1.図のようにブレードを挿入します。
1. Insert the blade as shown.
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。次に
ブレードAを軸に押しつけながら、ブレードを反時計方向に回してロックします。
ブレードBは時計回りに回してロックします。
2. Use a wrench to fasten the hexagonal nut under the base of the main axis,then press blade A onto the axis. Turn the blade counterclockwise to lock it in.
Blade B is locked in by turning it clockwise.
3.図のようにブレードカバーを取り付けます。
3. Attach blade cover as shown.
ブレードの取り外し:
Dismantling of blade:
1.図のようにブレードカバーを取り外します。
1. Remove the blade cover as shown.
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。
次にブレードAを軸に押し付けながら、ブレードを時計回りに回して緩めます。
ブレードBは反時計回りに回して緩めます。
2. Use a wrench to fasten the hexagonal nut under the base of the main axis, then press blade A onto the axis. Turn the blade clockwise to loosen it.
Blade B is loosened by turning it counter-clockwise.
3.ブレードを取り外します。
3. Remove the blade.
カメラの設置方法と解体方法
Camera's Installation and Dismantling Methods
カメラの取り付け手順:
Installation steps for camera
1.接続部にカメラを置き、図のように押します。
(説明書が違う。接続部にカメラをスライド(←向き)させ取り付けます。)
1. Aim the camera at the interface and push it as shown.
2.図のようにカメラのケーブルをソケットに接続します。
2. Connect the camera cable into the socket as shown.
カメラの取り外し手順:
Dismantling steps for camera
1.図のようにカメラのケーブルをソケットから引き抜きます。
1. Pull out the camera cable from the socket as shown.
2.ロックボタンを押しながらカメラをスライドさせ取り外します。
2. Press the camera locked button and pull camera out at the same time.
スマートフォンクリップホルダーの取り付け方法と分解方法
Installation and Dismantling Methods of Mobile Phone Retaining Clip
スマートフォンクリップホルダーの取り付け方法:
Mobile phone retaining clip's attachment method:
1.リモコンの上部の接続部にスマートフォンのクリップホルダーを差し込みます。
1.insert the phone clip holder into the connector at the top of the remote control.
2.ハンドルを押しクリップの開き方を調整してスマートフォンをはさみます。
2.Press the handles to adjust the jaws.
ドローンのバッテリー交換と充電方法
Battery Changing and Charging Methods for Drone
1.ドローンの電源ボタンを押して電源を切ってください。
1.Press the power button of the drone to turn it off.
2.バッテリーの底にあるロックボタンを押しながらバッテリーを引き抜きます。
2.Press the fixed components at the bottom of the battery and pull out the battery.
3.充電器のプラグをバッテリーのポートに接続し、充電器をコンセントに接続します。 充電中はインジケーターランプが赤く点灯し、充電が完了すると緑色に変わります。 バッテリーを完全に充電するのに150分かかります。
3. Connect the plug from the charger into the port in the battery, then connect the charger into the charging cradle. The indicator light will turn red while charging and turn green when charging is complete. It takes 150 minutes to completely charge the battery.
4.バッテリーが完全に充電されたら、バッテリーをドローンに戻します。
4. After the battery is fully charged, put the the battery back into the drone.
充電時間は約150分です。 浮上飛行時間は約9分です。
The charging time is about 150 minutes; Hover flight time is approximately 9 minutes.
バッテリの充電中に以下の注意事項があります。
- 充電済みのバッテリーを、直射日光や高温の場所に置かないでください。
火花がでたり、多くの場合設置している電気機器の損傷や爆発の原因となります。
- 電池を水に浸しないようにしてください。
電池は涼しく乾燥した場所に入れてください。
- バッテリーを分解しないでください。
- バッテリーの充電中に充電場所を離れることは避けてください。
充電する前に充電式電池を取り出してください。
- 充電式電池は、大人の監督下でのみ充電してください。
- 消耗したバッテリーは、ドローンから取り外す必要があります。
- 注意:電池を誤ったタイプに交換した場合、爆発の危険性がありますので、使用済みの電池は取扱説明書に従って廃棄してください。
Precautions as follows during charging of battery:
- Avoid placing the active batteries in places with direct posure,sunlight and high temperatures. For example, naked light or electrical equipment installations; otherwise it may cause damages or explosions.
- Avoid immersing the batteries in the water. The batteries shall be tored in a cool and dry place.
- Avoid dismantling the batteries.
- During the charging of battery, avoid leaving the charging place.
- Rechargeable batteries are to be removed from the toy before being charged.
- Rechargeable batteries are only to be charged under adult supervision.
- Exhausted batteries are to be removed from the toy.
- Caution: Risk of explosion if battery replaced by an incorrect type, dispose of used batteries according to the instructions.
中略
1.操作方法:
1.0peration Instructions:
①.最初に飛行に必要な安全な広い場所を見つける。
①.Find a wide place for flying.
②.ドローンにバッテリを取り付け、ドローンの先端を手前に向け水平に置き、電源ボタンを2秒間押してから離します。リモコンの電源を入れ、リモコンの左ジョイスティックを上に上げ、下に下ろします。リモコンが2回ビーと鳴り、ドローンのインジケータLEDが点滅後、点灯になれば、信号の接続が完了です。
(最初の飛行の前にコンパスを調整してください。)
②.Install the battery in the drone, and place it on a level surface with the nose of the drone face forward, press the power button for 2 seconds and then release. Power on the remote control, push the throttle joystick of the remote control up to the top and then down to the bottom.When the remote control beeps twice and the indicator light of the drone turns to solid from blink, signal connection completed.(Piease do calibrate the compass before the first flight.)
③.ドローンの後部LEDは、最初は橙色で、約1分後に緑色に点滅し、GPS信号の検索が終了します。 15秒後に飛行に十分なGPS信号が捕捉されると、緑色に点滅するLEDが点灯に変り、ドローンがGPS機能で飛行できることを示します。
③.The rear lights of the drone begin as solid orange, and turn to blink green about 1 minute later when finish the satellite signal searching. After 15 seconds, the blink green lights change to solid green, that indicates there are enough GPS points recorded successfully, and the drone is able to fly with GPS coordinates function.
④.左ジョイスティックを右下に、右ジョイスティックを左下に同時に押し込むか、左ジョイスティックを上に押してから中央に戻すと、ドローンのプロペラがゆっくりと回転し、ドローンの飛ぶ準備ができていることが示されます。
④.Push the left joystick to the right-bottom and the right joystick to the left-bottom simultaneously,or push the left joystick upward and then back to the midpoint, the propellers of the drone rotating slowly indicate the drone is ready to fly.
2.コンパスの校正:
2.Compass Calibration:
最初のフライトの前に、コンパスの校正が必要です。
リモコンをドローンと接続し、左ジョイスティックを右下に押しながら、次にリモコンの右上にあるワンタッチボタンを押します。
ドローンの赤色LEDがゆっくり点滅したら、左ジョイスティックを放し、赤色LEDの点滅が速くなるまで、ドローンを水平方向に360度回転させる。(約4回転)
次にドローンを垂直に持ち、(赤色LEDが上向き)水平方向に360度回転(約4回転)させ、赤色LEDが点灯状態になれば、キャリブレーションが終了です。
Before the first flight, the compass calibration is required. When the remote control has connected to the drone, push the left joystick to the right bottom corner and hold it, then press the One key return button located at the upper right corner of the remote control. When the red indicator lights flash slowly, release the left joystick and hold the drone horizontally and rotate 360 degrees till the red indicators of the drone turn to fast flashing(approx 4 circles). Hold the drone vertically, (with the red indicators pointing upward) and rotate it 360 degrees till the indicators turn to long bright (approx 4 circles),the calibration finished.
注意:
1. 強い磁場の所、磁石、地下の駐車場、鉄筋建築物のような大量の金属がある場所では、コンパスを校正することはできません。
2. キャリブレーション時に携帯電話や強磁性などの材料を持ち込んではいけません。
3. 飛行中にドローンが漂ったり揺れたりする場合は、再度コンパスの校正を行います。
Note:
1.Never calibrate the compass in a strong magnetic field or near the bulk metal, such as magnetite, parking lot and buildings with underground reinforced.
2.Never carry the ferromagnetic material, such as mobile phone, with you when calibrating.
3.Take a compass calibration when the drone drifting or swinging around during the flight.
3.ワン・キー・リターン:
3.0ne Key Return:
制御不能時や低電圧時にドローンの自動復帰やワンキーリターン機能を使用すると、フロントとリアのLEDが赤く点灯し、20メートル以内にあればすぐに帰還します。ドローンが20メートル以上離れている場合は、最初に高度を25メートルまで上昇し着陸地点上空へ戻ったあと、着陸(帰還)します。帰還中にもう一度リターンボタンを長押しするとドローンが復帰しますが、低電圧で自動帰還する場合以外で可能なモードです。ドローンが帰還中は、障害物を避けるための手動操作が可能で、手動操作を停止すると帰還モードに復帰します。着陸地点は、環境によって若干の誤差が発生しますが、これは正常な現象です。
When use the one key return function or the drone auto return when it is out of control or in low-voltage, the front and rear lights turn red, and the drone will return home immediately if it at the range of 20 meters, if the drone is beyond the the range of 20 meters, it will ascend at about 25 meters altitude first, then return home, and the drone will back to the record point at last. long press the one key return button again,the drone will exit return mode except it is auto return with low-voltage. When the drone returns home, manual operation to avoid obstacle is allowed, and it will continue to return if stopped manual operation. The return point will be a little errors cause by the environment, it's a normal phenomenon.
注意
.GPS信号が弱い場合、または失った場合、ドローンの緑色LEDがオレンジ色に変わるので、手動で帰還する操作する必要があります。(帰還させた後、GPS信号を取得するため)
2.ドローンが低電圧のときは、操作を停止して自動的に帰還するように制御しますが、帰還中に電池が切れた場合は、落下したり、墜落したりします。
Note:
1.When the GPS signal is weak or not work, the green light of the drone will turn orange, and it will fail to return home and get the GPS coordinates, and it need to be controlled to return home manually.
2.When the drone is low-voltage, stop other operation and control it to return, otherwise, it will fall down or crash when over low-voltage.
4.低電圧保護:
4. Low-Voltage Protection:
ドローンの4つのインジケータLEDが赤色に変わり、フロントLEDが点滅してドローンのバッテリ電力が低いことを示し、その後帰還ポイントに戻ります。
When the four indicator lights of the drone located the bottom turn red, and the front lights begin to blink, indicating the battery power of the drone is low, and it will return to the record point.
5.過電流保護:
5. Over-Current Protection:
ドローンが異物からの直接的な衝撃に遭遇した場合、または邪魔になった場合、またはブレードが回転していない場合は、無人機は過電流保護モードに入ります。
If the drone encounters a direct impact from a foreign object, or is obstructed, or if the blades are not rotating, the drone will go into over-current protection mode.
6.レベル校正機能:
6. Level Calibration Function:
ドローンを水平面に置き、同時に左右のジョイスティックを右下隅に2〜3秒押します。
LEDが速く点滅し、約2〜3秒後に通常の状態に戻りれば レベル校正は成功です。
Place the drone on a level surface and at the same time, push both left and right joysticks to the lower right corners for 2 to 3 seconds; the led light indicator on the drone will blink rapidly, and it will return back to the normal status after about 2 to 3 seconds. The level calibration is successful.
7.飛行速度の高/低速モード切替機能:
7.High/Low Speed Function:
最初の電源投入時はデフォルトで低速モードです。 右ジョイスティックを短時間押して高/低速モードを切り替えることができます。 右ジョイスティックを短時間押して高速モードに切り替えるとリモコンから2回ビープ音が鳴り、高速モードに切り替わります。再度ジョイスティックを短時間押して高速モードから低速モードに切り替えると、リモコンから1回ビープ音が鳴り、低速モードになります。
Low speed by default when first powered-on.
Possible to switch the function mode of high/low speed by pressing the right joystick for a short time. It is switched into high speed mode when two "beep" sounds come from the remote control, pressing the right joystick for a short time under fast speed mode and then one"beep" sound would come from the remote control, then it is switched back into low speed mode.
8.GPS座標および航空写真:
8.GPS Coordinates & Aerial Photography:
ドローンがリターンポイントを記録し終えると、定点(単焦点)で航空写真を正確に撮ることができ、カメラは0-90度の範囲でカメラの角度を上下に調整してビデオを撮影したり録画したりできます。
After the drone complete recording the return point, it can take an aerial photography at the fixed point accurately, the camera will able to take the photo or record the video with adjusting the camera angle up and down at the range of 0-90 degree.
広い場所では、飛行範囲は200メートル以上であり、GPS座標の限界高度は約100メートルである
In the wide place, the flying range is more than 200 meters,and the L1m1t height of the GPS coordmates is about 100 meters.
9.ホバリング機能:
9. Auto Hover Function:
左のジョイスティック(スロットル)を使用して無人機の降下飛行を制御した後、
左のジョイスティック(スロットル)を離すと、ジョイスティックが離されたときにドローンがその高さでホバリングします。
After using the left joystick (throttle) to control the ascending I descending flight of the drone, release the left joystick (throttle) and the drone will hover at that height when the joystick is released .
10.ヘッドレス機能:
10.Headless Function :
①.順方向の定義:
①Defining forward direction:
•リモコンの電源ボタンを押します。
• Press on the power button of the remote control.
•バッテリーをドローンに接続し、ドローンの電源ボタンを押すと、ドローンの方向がヘッドレスモードの新しい順方向として指定されます。
•Connect the battery to the drone, press the power button of the drone, and adjust the specified direction of the drone's head under the headless mode as the new forward direction.
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴れば、周波数と順方向の定義され、ヘッドレス機能が設定できたことを意味します。
• Push the left joystick (throttle) on the remote control up to the farthest position and then pull down to the farthest position. When the remote control issues a long beep sound, it means the frequency and
defining forward direction functions are completed.
②.前進方向の定義のための校正:
②Calibration for the definition of the front:
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴ると、周波数と順方向の定義が完了したことを意味します。
ドローンがヘッドレスモードで異物と直接衝突すると、ドローンの飛行方向を補正位置に置いた後に左右のジョイスティックを同時に左下隅に押し込むだけでよい。 ドローンのインジケータLEDが点灯した後、3秒間ゆっくりと点滅すれば校正が完了したことを示します。
When the drone encounters a direct impact with foreign objects in the headless mode, if there is an occurrence of deviation of the defined direction, it is only required to push both the left and right joysticks to the bottom left corners simultaneously after placing the flying direction of the drone in the correction position. When the LED indicator of the drone turn to solid after slowly flashing for 3 seconds, it indicates the calibration is complete.
③ヘッドレス機能と通常機能との間のトグリング:
③Toggling between headless function and normal function:
・ドローンが対応する周波数とマッチした後、ドローンはデフォルトで通常のパターンになります。 このとき、ドローンのインジケータLEDは、点灯しています。 リモコンの右ジョイスティックを2秒間押した後、リモコンから「ビー、ビー、ビー」と音が出て、ヘッドレスモードに入ったことを示します。右ジョイスティックを2回押して (ヘッドレスモードの状態では、無人機の4つのインジケータライトが4秒に1回ゆっくりと1回ずつ)、長い「ビープ音」の音が聞こえて終了ステータスが表示されます。
•After the drone is matched with the corresponding frequency, the drone would be in normal pattern by default. At this time the indicator light on the drone would be in a state of on for a long time. After pressing in on the right joystick of the remote control for 2 seconds, the remote control would make a sound of "beep, beep, beep" to show that it has entered into a state of headless mode.Pressing in on right joystick for 2 seconds then a long sound of "beep" would be heard to show an exit status.(When under the state of headless mode, four indicator lights on the drone flash slowly once every four seconds).
•ヘッドレスモードでは、オペレータは無人機の頭部位置を区別する必要がなく、リモコンの右のジョイスティックの方向を使用してドローンの方向を正面/背面面で左右に制御するだけで済みます。
•Under the headless mode, the operator does not need to differentiate the head position of the drone, and only needs to control the drone's direction front/back/left/right by using the right joystick direction on the remote control.
中略
復旧手順(トラブル発生時)
Rectification Procedures
問題・症状:
ドローンの応答がありません
原因:
1.ドローンが低電圧保護に入った。
2.リモコンの電池が少ないときは、電源ランプが点滅します。
解決方法:
1.ドローンを充電する。
2.リモコンの電池を交換する。
問題・症状:
ドローンの飛行応答は敏感ではない
理由:
1.リモコンの電池が少ない。
2.リモコンと同じ周波数の干渉があります。
解決方法:
1.電池を交換します。
2.同じ周波数の干渉しない場所に変更します。
問題・症状:
ドローンがホバリング中に一方向にずれて飛んでいく。
理由:
1.ドローンが地面に対して校正されていません。
解決方法:
1.ドローンが地面と水平になるまで校正を再調整します。
詳細は、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
問題・症状:
ヘッドレスモードで、前方向に偏る。
理由:
1.多くの場合、衝突が原因でヘッドドリフトを引き起こす可能性があります。
解決方法:
1.正面方向を再定義します。詳細は、9ページのNo.10(ヘッドレス機能)を参照してください。
問題・症状:
上下にふらつく/激しく不安定な飛行
理由:
1.ドローンが地面に対して校正されていません。
2.厳しい気象条件で気圧が不安定になっている。
3.激しい衝突により、ジャイロスコープのデータが乱れている。
解決方法:
1.ドローンが地面と水平になるまで校正を再調整します。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
2.厳しい気象条件下での飛行は避けてください。
3.レベル調整をもう一度行います。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
Rectification Procedures
The drone has no response
1. The drone has entered into lowvoltage protection.
2. When the power of the remote control is weak, the power light indicator will blink.
1. Charge up the drone.
2. Change the batteries of the remote control.
The flight response of the drone is not sensitive
1. The power of the remote control is weak.
2. There is an interference with the same frequency as that of the remote control.
1. Change the batteries.
2. Change to a place where there is no interference with the same frequency.
The drone is flying towards its side in one direction during hovering
1. The drone is not calibrated level to the ground.
1. Re-adjust the calibration until the aircraft is level to the ground. For further details, see No.6 on Page8 for details (Level calibration function).
In the headless state, it is biased towards the front direction
1. Many collisions may cause head drift.
1.Re-define the front direction. For further details, see No. 10 on Page 9 for details (Headless function).
Fixed high instability/up and down movement
1. The drone is not calibrated level to the ground.
2. Unstable air pressure under the severe weather condition.
3. Violent collision resulting in data disorder of gyroscope.
1.Re-adjust the calibration until the drone is level to the ground. For further details, see No.6 on Page 8 for details(Level calibration function).
2.Avoid to fty under the severe weather condition.
3.Make level adjustment again, see No.6 on Page 8 for details (Level calibration function).
SYMA X8PRO 重量など [ドローン]
SYMA X8PRO
製品サイズと重さ
幅:50cm 長さ:50cm 高さ:19cm 重量:645g

バッテリー(7.4V2000mAh)の重量:123g

カメラ(HD1280x720 可動式)の重量:31g

飛行制御距離
飛行距離:200m
高度:100m
動画:HD(1280x720) 音声なし
トラブル手順
問題・症状:
ドローンの応答がありません
原因:
1.ドローンが低電圧保護に入った。
2.リモコンの電池が少ないときは、電源ランプが点滅します。
解決方法:
1.ドローンを充電する。
2.リモコンの電池を交換する。
問題・症状:
ドローンの飛行応答は敏感ではない
理由:
1.リモコンの電池が少ない。
2.リモコンと同じ周波数の干渉があります。
解決方法:
1.電池を交換します。
2.同じ周波数の干渉しない場所に変更します。
問題・症状:
ドローンがホバリング中に一方向にずれて飛んでいく。
理由:
1.ドローンが地面に対して校正されていません。
解決方法:
1.ソローンが地面と水平になるまで校正を再調整します。
詳細は、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
問題・症状:
ヘッドレスモードで、前方向に偏る。
理由:
1.多くの場合、衝突が原因でヘッドドリフトを引き起こす可能性があります。
解決方法:
1.正面方向を再定義します。詳細は、9ページのNo.10(ヘッドレス機能)を参照してください。
問題・症状:
上下にふらつく/激しく不安定な飛行
理由:
1.ドローンが地面に対して校正されていません。
2.厳しい気象条件で気圧が不安定になっている。
3.激しい衝突により、ジャイロスコープのデータが乱れている。
解決方法:
1.ドローンが地面と水平になるまで校正を再調整します。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
2.厳しい気象条件下での飛行は避けてください。
3.レベル調整をもう一度行います。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
Rectification Procedures
The drone has no response
1. The drone has entered into lowvoltage protection.
2. When the power of the remote control is weak, the power light indicator will blink.
1. Charge up the drone.
2. Change the batteries of the remote control.
The flight response of the drone is not sensitive
1. The power of the remote control is weak.
2. There is an interference with the same frequency as that of the remote control.
1. Change the batteries.
2. Change to a place where there is no interference with the same frequency.
The drone is flying towards its side in one direction during hovering
1. The drone is not calibrated level to the ground.
1. Re-adjust the calibration until the aircraft is level to the ground. For further details, see No.6 on Page8 for details (Level calibration function).
In the headless state, it is biased towards the front direction
1. Many collisions may cause head drift.
1.Re-define the front direction. For further details, see No. 10 on Page 9 for details (Headless function).
Fixed high instability/up and down movement
1. The drone is not calibrated level to the ground.
2. Unstable air pressure under the severe weather condition.
3. Violent collision resulting in data disorder of gyroscope.
1.Re-adjust the calibration until the drone is level to the ground. For further details, see No.6 on Page 8 for details(Level calibration function).
2.Avoid to fty under the severe weather condition.
3.Make level adjustment again, see No.6 on Page 8 for details (Level calibration function).
製品サイズと重さ
幅:50cm 長さ:50cm 高さ:19cm 重量:645g

バッテリー(7.4V2000mAh)の重量:123g

カメラ(HD1280x720 可動式)の重量:31g

飛行制御距離
飛行距離:200m
高度:100m
動画:HD(1280x720) 音声なし
トラブル手順
問題・症状:
ドローンの応答がありません
原因:
1.ドローンが低電圧保護に入った。
2.リモコンの電池が少ないときは、電源ランプが点滅します。
解決方法:
1.ドローンを充電する。
2.リモコンの電池を交換する。
問題・症状:
ドローンの飛行応答は敏感ではない
理由:
1.リモコンの電池が少ない。
2.リモコンと同じ周波数の干渉があります。
解決方法:
1.電池を交換します。
2.同じ周波数の干渉しない場所に変更します。
問題・症状:
ドローンがホバリング中に一方向にずれて飛んでいく。
理由:
1.ドローンが地面に対して校正されていません。
解決方法:
1.ソローンが地面と水平になるまで校正を再調整します。
詳細は、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
問題・症状:
ヘッドレスモードで、前方向に偏る。
理由:
1.多くの場合、衝突が原因でヘッドドリフトを引き起こす可能性があります。
解決方法:
1.正面方向を再定義します。詳細は、9ページのNo.10(ヘッドレス機能)を参照してください。
問題・症状:
上下にふらつく/激しく不安定な飛行
理由:
1.ドローンが地面に対して校正されていません。
2.厳しい気象条件で気圧が不安定になっている。
3.激しい衝突により、ジャイロスコープのデータが乱れている。
解決方法:
1.ドローンが地面と水平になるまで校正を再調整します。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
2.厳しい気象条件下での飛行は避けてください。
3.レベル調整をもう一度行います。
詳しくは、8ページのNo.6(レベルキャリブレーション機能)を参照してください。
Rectification Procedures
The drone has no response
1. The drone has entered into lowvoltage protection.
2. When the power of the remote control is weak, the power light indicator will blink.
1. Charge up the drone.
2. Change the batteries of the remote control.
The flight response of the drone is not sensitive
1. The power of the remote control is weak.
2. There is an interference with the same frequency as that of the remote control.
1. Change the batteries.
2. Change to a place where there is no interference with the same frequency.
The drone is flying towards its side in one direction during hovering
1. The drone is not calibrated level to the ground.
1. Re-adjust the calibration until the aircraft is level to the ground. For further details, see No.6 on Page8 for details (Level calibration function).
In the headless state, it is biased towards the front direction
1. Many collisions may cause head drift.
1.Re-define the front direction. For further details, see No. 10 on Page 9 for details (Headless function).
Fixed high instability/up and down movement
1. The drone is not calibrated level to the ground.
2. Unstable air pressure under the severe weather condition.
3. Violent collision resulting in data disorder of gyroscope.
1.Re-adjust the calibration until the drone is level to the ground. For further details, see No.6 on Page 8 for details(Level calibration function).
2.Avoid to fty under the severe weather condition.
3.Make level adjustment again, see No.6 on Page 8 for details (Level calibration function).
SYMA X8PRO 購入(衝動買い) [ドローン]
10月20日に注文しEMSで10月30日に無事到着。
聞いたことのない運送会社だったので、また地球の裏を回ってくるのかと心配していましたが、今回は飛行機で関空まで直接きていたようです。
早速開梱。組み立てします。

梱包箱はギリギリサイズの手作り品w

X8SW用のバッテリーを同時注文していたため、すでに開封済み。

内箱は2個

SUREHOBBYさんの送料は1個1個積算されるのに、これはないだろう・・・・と個人的に思います。
パッケージ1式 取扱説明書は折れてくしゃくしゃw

上がX8SW用下がX8PROの付属品 ロックボタンの色が違うだけ(若干高さも違うか)

SW用で動作確認OKでした。基本的にX8SWと同じ筐体なので、部品に関してはほぼ互換性があるのではないでしょうか。
とりあえずUSER MANUAL通りに組み立て。英語なので絵だけが頼りですw
まず、プロペラガードですが、差し込むだけ。穴に

突っ込む

次にプロペラですが、ドローンには2種類のプロペラがあります。
順回転用(CW)と逆回転用(CCW)
X8PROはAとBの2種類 本体とプロペラにそれぞれ刻印されていますので、
Aの腕にはAのプロペラ
Bの腕にはBのプロペラ
を取り付けます。
プロペラはちょっと出っ張ってる方が下になります。穴の形に合わせてプロペラを回転軸に入れてから
付属のスパナを使い回転軸を固定。

その後で、下に押し付けながら60度位回転させるとロックができるようです。

押し付けながら回転させてロック

H502Eよりはるかに簡単というかビス止めしないので失敗する可能性がないですね。
そして脱落防止用のキャップをかぶせたらプロペラ取り付け終了です。

次は足、これもワンタッチ取り付けです。本当に簡単ですね。


最後にカメラを胴体下部にスライドさせて取付け、コネクタを差し込んで完成です。

H502Eに慣れているので、この本体のでかさにびっくりです。

早速飛ばしましょう。
・本体の電源を長押しして入れ(ピッっとなるまで)
・プロポの電源を入れ
・バインド プロポの左レバーを ↑ ↓の順番に操作すると、本体の赤色LEDが点灯。
・キャリブレーション プロポの左レバーを右下入れたまま右上下のボタンを押すと赤色LEDがゆっくり点滅。
・本体を水平にクルクル(赤高速点滅) → 垂直にクルクル(赤常灯)
・しばらくほっとくと、緑LEDにが短く点滅するとGPS捕捉完了?で飛行可能です。

詳しくはyoutubeにチュートリアルがあるので見ると細かい所がわかると思います。
説明書訳
保護部品(ブレードガード)の取り付け:
保護部品(ブレードガード)を図のようにドローンに挿入します。
保護部品(ブレードガード)の取り外し:
図のようにロックレバー上向きに押しながら保護部品(ブレードガード)を取り外します。
ブレードの取り付け:
1.図のようにブレードを挿入します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。次に
ブレードAを軸に押しつけながら、ブレードを反時計方向に回してロックします。
ブレードBは時計回りに回してロックします。
3.図のようにブレードカバーを取り付けます。
ブレードの取り外し:
1.図のようにブレードカバーを取り外します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。
次にブレードAを軸に押し付けながら、ブレードを時計回りに回して緩めます。
ブレードBは反時計回りに回して緩めます。
3.ブレードを取り外します。
カメラの取り付け手順:
1.接続部にカメラを置き、図のように押します。
(説明書が違う。接続部にカメラをスライド(←向き)させ取り付けます。)
2.図のようにカメラのケーブルをソケットに接続します。
カメラの取り外し手順:
1.図のようにカメラのケーブルをソケットから引き抜きます。
2.ロックボタンを押しながらカメラをスライドさせ取り外します。
スマートフォン保持用クリップホルダーの取り付け方法:
1.リモコンの上部の接続部にスマートフォンのクリップホルダーを差し込みます。
2.ハンドルを押しクリップの開き方を調整してスマートフォンをはさみます。
・・・ こんな所翻訳必要ないか。
中略w
6ページ後半に飛びます。
1.操作方法:
1.最初に飛行に必要な安全な広い場所を見つける。
2.ドローンにバッテリを取り付け、ドローンの先端を手前に向け水平に置き、電源ボタンを2秒間押してから離します。リモコンの電源を入れ、リモコンの左ジョイスティックを上に上げ、下に下ろします。リモコンが2回ビーと鳴り、ドローンのインジケータLEDが点滅後、点灯になれば、信号の接続が完了です。
(最初の飛行の前にコンパスを調整してください。)
3.ドローンの後部LEDは、最初は橙色で、約1分後に緑色に点滅し、GPS信号の検索が終了します。 15秒後に飛行に十分なGPS信号が捕捉されると、緑色に点滅するLEDが点灯に変り、ドローンがGPS機能で飛行できることを示します。
4.左ジョイスティックを右下に、右ジョイスティックを左下に同時に押し込むか、左ジョイスティックを上に押してから中央に戻すと、ドローンのプロペラがゆっくりと回転し、ドローンの飛ぶ準備ができていることが示されます。
コンパスの校正
最初のフライトの前に、コンパスの校正が必要です。
リモコンをドローンと接続し、左ジョイスティックを右下に押しながら、次にリモコンの右上にあるワンタッチボタンを押します。
ドローンの赤色LEDがゆっくり点滅したら、左ジョイスティックを放し、赤色LEDの点滅が速くなるまで、ドローンを水平方向に360度回転させる。(約4回転)
次にドローンを垂直に持ち、(赤色LEDが上向き)水平方向に360度回転(約4回転)させ、赤色LEDが点灯状態になれば、キャリブレーションが終了です。
Note:
1.Never calibrate the compass in a strong magnetic field or near the bulk metal, such as magnetite, parking lot and buildings with underground reinforced.
2.Never carry the ferromagnetic material, such as mobile phone, with you when calibrating.
3.Take a compass calibration when the drone drifting or swinging around during the flight.
注意:
1. 強い磁場の所、磁石、地下の駐車場、鉄筋建築物のような大量の金属がある場所では、コンパスを校正することはできません。
2. キャリブレーション時に携帯電話や強磁性などの材料を持ち込んではいけません。
3. 飛行中にドローンが漂ったり揺れたりする場合は、再度コンパスの校正を行います。
3.ワン・キー・リターン:
制御不能時や低電圧時にドローンの自動復帰やワンキーリターン機能を使用すると、フロントとリアのLEDが赤く点灯し、20メートル以内にあればすぐに帰還します。ドローンが20メートル以上離れている場合は、最初に高度を25メートルまで上昇し着陸地点上空へ戻ったあと、着陸(帰還)します。帰還中にもう一度リターンボタンを長押しするとドローンが復帰しますが、低電圧で自動帰還する場合以外で可能なモードです。ドローンが帰還中は、障害物を避けるための手動操作が可能で、手動操作を停止すると帰還モードに復帰します。着陸地点は、環境によって若干の誤差が発生しますが、これは正常な現象です。
注意
.GPS信号が弱い場合、または失った場合、ドローンの緑色LEDがオレンジ色に変わるので、手動で帰還する操作する必要があります。(帰還させた後、GPS信号を取得するため)
2.ドローンが低電圧のときは、操作を停止して自動的に帰還するように制御しますが、帰還中に電池が切れた場合は、落下したり、墜落したりします。
4.低電圧保護:
ドローンの4つのインジケータLEDが赤色に変わり、フロントLEDが点滅してドローンのバッテリ電力が低いことを示し、その後帰還ポイントに戻ります。
5.過電流保護:
ドローンが異物からの直接的な衝撃に遭遇した場合、または邪魔になった場合、またはブレードが回転していない場合は、無人機は過電流保護モードに入ります。
6.レベル校正機能:
ドローンを水平面に置き、同時に左右のジョイスティックを右下隅に2〜3秒押します。
LEDが速く点滅し、約2〜3秒後に通常の状態に戻りれば レベル校正は成功です。
7.高/低速モード切替機能:
最初の電源投入時はデフォルトで低速モードです。 右ジョイスティックを短時間押して高/低速モードを切り替えることができます。 右ジョイスティックを短時間押して高速モードに切り替えるとリモコンから2回ビープ音が鳴り、高速モードに切り替わります。再度ジョイスティックを短時間押して高速モードから低速モードに切り替えると、リモコンから1回ビープ音が鳴り、低速モードになります。
8.GPS座標および航空写真:
ドローンがリターンポイントを記録し終えると、定点(単焦点)で航空写真を正確に撮ることができ、カメラは0-90度の範囲でカメラの角度を上下に調整してビデオを撮影したり録画したりできます。
広い場所では、飛行範囲は200メートル以上であり、GPS座標の限界高度は約100メートルである
9.ホバリング機能:
左のジョイスティック(スロットル)を使用して無人機の降下飛行を制御した後、
左のジョイスティック(スロットル)を離すと、ジョイスティックが離されたときにドローンがその高さでホバリングします。
10.ヘッドレス機能:
1.順方向の定義:
•リモコンの電源ボタンを押します。
•バッテリーをドローンに接続し、ドローンの電源ボタンを押すと、ドローンの方向がヘッドレスモードの新しい順方向として指定されます。
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴れば、周波数と順方向の定義され、ヘッドレス機能が設定できたことを意味します。
2.前進方向の定義のための校正:
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴ると、周波数と順方向の定義が完了したことを意味します。
ドローンがヘッドレスモードで異物と直接衝突すると、ドローンの飛行方向を補正位置に置いた後に左右のジョイスティックを同時に左下隅に押し込むだけでよい。 ドローンのインジケータLEDが点灯した後、3秒間ゆっくりと点滅すれば校正が完了したことを示します。
3ヘッドレス機能と通常機能との間のトグリング:
ドローンが対応する周波数とマッチした後、ドローンはデフォルトで通常のパターンになります。 このとき、ドローンのインジケータLEDは、点灯しています。 リモコンの右ジョイスティックを2秒間押した後、リモコンから「ビー、ビー、ビー」と音が出て、ヘッドレスモードに入ったことを示します。右ジョイスティックを2回押して (ヘッドレスモードの状態では、無人機の4つのインジケータライトが4秒に1回ゆっくりと1回ずつ)、長い「ビープ音」の音が聞こえて終了ステータスが表示されます。
•ヘッドレスモードでは、オペレータは無人機の頭部位置を区別する必要がなく、リモコンの右のジョイスティックの方向を使用してドローンの方向を正面/背面面で左右に制御するだけで済みます。
聞いたことのない運送会社だったので、また地球の裏を回ってくるのかと心配していましたが、今回は飛行機で関空まで直接きていたようです。
早速開梱。組み立てします。

梱包箱はギリギリサイズの手作り品w

X8SW用のバッテリーを同時注文していたため、すでに開封済み。

内箱は2個

SUREHOBBYさんの送料は1個1個積算されるのに、これはないだろう・・・・と個人的に思います。
パッケージ1式 取扱説明書は折れてくしゃくしゃw

上がX8SW用下がX8PROの付属品 ロックボタンの色が違うだけ(若干高さも違うか)

SW用で動作確認OKでした。基本的にX8SWと同じ筐体なので、部品に関してはほぼ互換性があるのではないでしょうか。
とりあえずUSER MANUAL通りに組み立て。英語なので絵だけが頼りですw
まず、プロペラガードですが、差し込むだけ。穴に

突っ込む

次にプロペラですが、ドローンには2種類のプロペラがあります。
順回転用(CW)と逆回転用(CCW)
X8PROはAとBの2種類 本体とプロペラにそれぞれ刻印されていますので、
Aの腕にはAのプロペラ
Bの腕にはBのプロペラ
を取り付けます。
プロペラはちょっと出っ張ってる方が下になります。穴の形に合わせてプロペラを回転軸に入れてから
付属のスパナを使い回転軸を固定。

その後で、下に押し付けながら60度位回転させるとロックができるようです。

押し付けながら回転させてロック

H502Eよりはるかに簡単というかビス止めしないので失敗する可能性がないですね。
そして脱落防止用のキャップをかぶせたらプロペラ取り付け終了です。

次は足、これもワンタッチ取り付けです。本当に簡単ですね。


最後にカメラを胴体下部にスライドさせて取付け、コネクタを差し込んで完成です。
H502Eに慣れているので、この本体のでかさにびっくりです。

早速飛ばしましょう。

詳しくはyoutubeにチュートリアルがあるので見ると細かい所がわかると思います。
説明書訳
保護部品(ブレードガード)の取り付け:
保護部品(ブレードガード)を図のようにドローンに挿入します。
保護部品(ブレードガード)の取り外し:
図のようにロックレバー上向きに押しながら保護部品(ブレードガード)を取り外します。
ブレードの取り付け:
1.図のようにブレードを挿入します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。次に
ブレードAを軸に押しつけながら、ブレードを反時計方向に回してロックします。
ブレードBは時計回りに回してロックします。
3.図のようにブレードカバーを取り付けます。
ブレードの取り外し:
1.図のようにブレードカバーを取り外します。
2.レンチを使用して主軸のベースの下にある六角ナットを固定します。
次にブレードAを軸に押し付けながら、ブレードを時計回りに回して緩めます。
ブレードBは反時計回りに回して緩めます。
3.ブレードを取り外します。
カメラの取り付け手順:
1.接続部にカメラを置き、図のように押します。
(説明書が違う。接続部にカメラをスライド(←向き)させ取り付けます。)
2.図のようにカメラのケーブルをソケットに接続します。
カメラの取り外し手順:
1.図のようにカメラのケーブルをソケットから引き抜きます。
2.ロックボタンを押しながらカメラをスライドさせ取り外します。
スマートフォン保持用クリップホルダーの取り付け方法:
1.リモコンの上部の接続部にスマートフォンのクリップホルダーを差し込みます。
2.ハンドルを押しクリップの開き方を調整してスマートフォンをはさみます。
・・・ こんな所翻訳必要ないか。
中略w
6ページ後半に飛びます。
1.操作方法:
1.最初に飛行に必要な安全な広い場所を見つける。
2.ドローンにバッテリを取り付け、ドローンの先端を手前に向け水平に置き、電源ボタンを2秒間押してから離します。リモコンの電源を入れ、リモコンの左ジョイスティックを上に上げ、下に下ろします。リモコンが2回ビーと鳴り、ドローンのインジケータLEDが点滅後、点灯になれば、信号の接続が完了です。
(最初の飛行の前にコンパスを調整してください。)
3.ドローンの後部LEDは、最初は橙色で、約1分後に緑色に点滅し、GPS信号の検索が終了します。 15秒後に飛行に十分なGPS信号が捕捉されると、緑色に点滅するLEDが点灯に変り、ドローンがGPS機能で飛行できることを示します。
4.左ジョイスティックを右下に、右ジョイスティックを左下に同時に押し込むか、左ジョイスティックを上に押してから中央に戻すと、ドローンのプロペラがゆっくりと回転し、ドローンの飛ぶ準備ができていることが示されます。
コンパスの校正
最初のフライトの前に、コンパスの校正が必要です。
リモコンをドローンと接続し、左ジョイスティックを右下に押しながら、次にリモコンの右上にあるワンタッチボタンを押します。
ドローンの赤色LEDがゆっくり点滅したら、左ジョイスティックを放し、赤色LEDの点滅が速くなるまで、ドローンを水平方向に360度回転させる。(約4回転)
次にドローンを垂直に持ち、(赤色LEDが上向き)水平方向に360度回転(約4回転)させ、赤色LEDが点灯状態になれば、キャリブレーションが終了です。
Note:
1.Never calibrate the compass in a strong magnetic field or near the bulk metal, such as magnetite, parking lot and buildings with underground reinforced.
2.Never carry the ferromagnetic material, such as mobile phone, with you when calibrating.
3.Take a compass calibration when the drone drifting or swinging around during the flight.
注意:
1. 強い磁場の所、磁石、地下の駐車場、鉄筋建築物のような大量の金属がある場所では、コンパスを校正することはできません。
2. キャリブレーション時に携帯電話や強磁性などの材料を持ち込んではいけません。
3. 飛行中にドローンが漂ったり揺れたりする場合は、再度コンパスの校正を行います。
3.ワン・キー・リターン:
制御不能時や低電圧時にドローンの自動復帰やワンキーリターン機能を使用すると、フロントとリアのLEDが赤く点灯し、20メートル以内にあればすぐに帰還します。ドローンが20メートル以上離れている場合は、最初に高度を25メートルまで上昇し着陸地点上空へ戻ったあと、着陸(帰還)します。帰還中にもう一度リターンボタンを長押しするとドローンが復帰しますが、低電圧で自動帰還する場合以外で可能なモードです。ドローンが帰還中は、障害物を避けるための手動操作が可能で、手動操作を停止すると帰還モードに復帰します。着陸地点は、環境によって若干の誤差が発生しますが、これは正常な現象です。
注意
.GPS信号が弱い場合、または失った場合、ドローンの緑色LEDがオレンジ色に変わるので、手動で帰還する操作する必要があります。(帰還させた後、GPS信号を取得するため)
2.ドローンが低電圧のときは、操作を停止して自動的に帰還するように制御しますが、帰還中に電池が切れた場合は、落下したり、墜落したりします。
4.低電圧保護:
ドローンの4つのインジケータLEDが赤色に変わり、フロントLEDが点滅してドローンのバッテリ電力が低いことを示し、その後帰還ポイントに戻ります。
5.過電流保護:
ドローンが異物からの直接的な衝撃に遭遇した場合、または邪魔になった場合、またはブレードが回転していない場合は、無人機は過電流保護モードに入ります。
6.レベル校正機能:
ドローンを水平面に置き、同時に左右のジョイスティックを右下隅に2〜3秒押します。
LEDが速く点滅し、約2〜3秒後に通常の状態に戻りれば レベル校正は成功です。
7.高/低速モード切替機能:
最初の電源投入時はデフォルトで低速モードです。 右ジョイスティックを短時間押して高/低速モードを切り替えることができます。 右ジョイスティックを短時間押して高速モードに切り替えるとリモコンから2回ビープ音が鳴り、高速モードに切り替わります。再度ジョイスティックを短時間押して高速モードから低速モードに切り替えると、リモコンから1回ビープ音が鳴り、低速モードになります。
8.GPS座標および航空写真:
ドローンがリターンポイントを記録し終えると、定点(単焦点)で航空写真を正確に撮ることができ、カメラは0-90度の範囲でカメラの角度を上下に調整してビデオを撮影したり録画したりできます。
広い場所では、飛行範囲は200メートル以上であり、GPS座標の限界高度は約100メートルである
9.ホバリング機能:
左のジョイスティック(スロットル)を使用して無人機の降下飛行を制御した後、
左のジョイスティック(スロットル)を離すと、ジョイスティックが離されたときにドローンがその高さでホバリングします。
10.ヘッドレス機能:
1.順方向の定義:
•リモコンの電源ボタンを押します。
•バッテリーをドローンに接続し、ドローンの電源ボタンを押すと、ドローンの方向がヘッドレスモードの新しい順方向として指定されます。
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴れば、周波数と順方向の定義され、ヘッドレス機能が設定できたことを意味します。
2.前進方向の定義のための校正:
•リモコンの左ジョイスティック(スロットル)を一番上まで押してから、一番下に下げます。
リモコンから長いビープ音が鳴ると、周波数と順方向の定義が完了したことを意味します。
ドローンがヘッドレスモードで異物と直接衝突すると、ドローンの飛行方向を補正位置に置いた後に左右のジョイスティックを同時に左下隅に押し込むだけでよい。 ドローンのインジケータLEDが点灯した後、3秒間ゆっくりと点滅すれば校正が完了したことを示します。
3ヘッドレス機能と通常機能との間のトグリング:
ドローンが対応する周波数とマッチした後、ドローンはデフォルトで通常のパターンになります。 このとき、ドローンのインジケータLEDは、点灯しています。 リモコンの右ジョイスティックを2秒間押した後、リモコンから「ビー、ビー、ビー」と音が出て、ヘッドレスモードに入ったことを示します。右ジョイスティックを2回押して (ヘッドレスモードの状態では、無人機の4つのインジケータライトが4秒に1回ゆっくりと1回ずつ)、長い「ビープ音」の音が聞こえて終了ステータスが表示されます。
•ヘッドレスモードでは、オペレータは無人機の頭部位置を区別する必要がなく、リモコンの右のジョイスティックの方向を使用してドローンの方向を正面/背面面で左右に制御するだけで済みます。
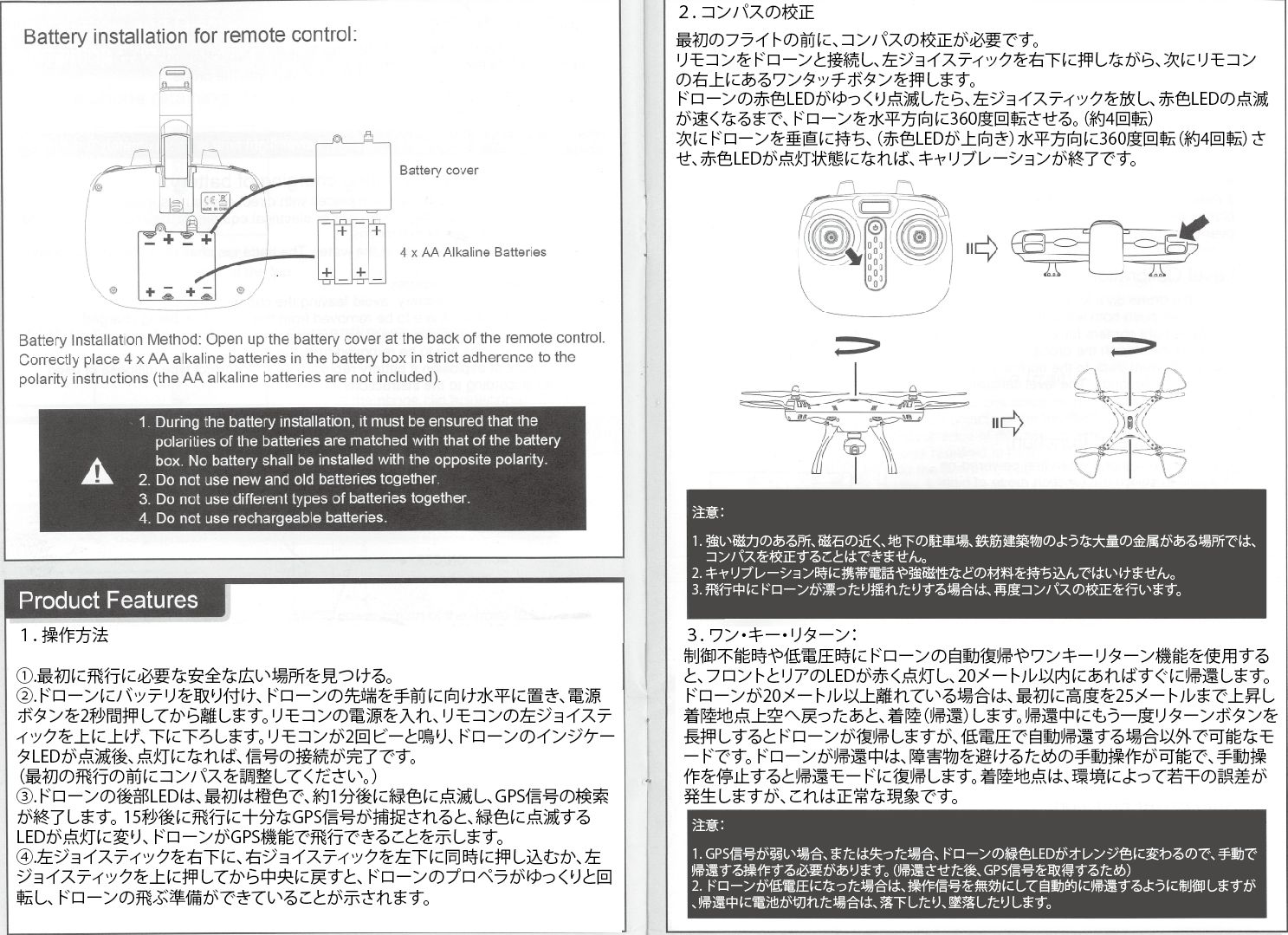
SYMA X8PRO と X8SW [ドローン]
SYMA X8PRO っていうドローン
重量が460gほどあるので200g未満のトイドローンではありませんので、飛行させるには厳しい規制がついてきますが、なかなか良さそうな機体です。
見た目で判断している部分もありますが
FPV
GPS
ブラシレスモータ普通のDCモーターのようです。
90度回転できる可動式カメラ
を搭載して、販売価格は、ほぼ10000円
ほぼおなじスペックの多分PROより古いと思われるSWですが
GPSなし
カメラ固定で13000円?
なぜ高いの?
なにか特別な仕様があるのかと調べてみましたが特にそんなことはないっぽいです。(3Dフリップができる?宙返り?)
よく見てみれば、
・SWは送料無料
・PROは送料有料
で安い方の送料を加えると13461円となり、微妙に高いことが判明w
カメラがフルHDで無い事と、飛行時間が9分しかないことを除けば、H502Eとほぼ同じ価格でなかなかのコスパに優れた機体かもしれません。
youtubeで見る限り動画も緑っぽくないみたいですし・・・・ もし画質に問題があっても、どうにかすれば、APEMAN A80を搭載できそうだしね。
主な仕様
動画解像度:HD 1280x720
遠隔距離:約70m
充電時間:約150分
飛行時間:約9分
クアドコプターバッテリー:7.4V 2000mAhリチウムイオンバッテリー
送信機のバッテリー:4 *単三電池(別売り)
寸法:500mm x 500mm x 190mm
SYMA X8PRO 10630円 SUREHOBBY
SYMA X8SW 13030円 SUREHOBBY
重量が460gほどあるので200g未満のトイドローンではありませんので、飛行させるには厳しい規制がついてきますが、なかなか良さそうな機体です。
見た目で判断している部分もありますが
FPV
GPS
90度回転できる可動式カメラ
を搭載して、販売価格は、ほぼ10000円
ほぼおなじスペックの多分PROより古いと思われるSWですが
GPSなし
カメラ固定で13000円?
なぜ高いの?
なにか特別な仕様があるのかと調べてみましたが特にそんなことはないっぽいです。(3Dフリップができる?宙返り?)
よく見てみれば、
・SWは送料無料
・PROは送料有料
で安い方の送料を加えると13461円となり、微妙に高いことが判明w
カメラがフルHDで無い事と、飛行時間が9分しかないことを除けば、H502Eとほぼ同じ価格でなかなかのコスパに優れた機体かもしれません。
youtubeで見る限り動画も緑っぽくないみたいですし・・・・ もし画質に問題があっても、どうにかすれば、APEMAN A80を搭載できそうだしね。
主な仕様
動画解像度:HD 1280x720
遠隔距離:約70m
充電時間:約150分
飛行時間:約9分
クアドコプターバッテリー:7.4V 2000mAhリチウムイオンバッテリー
送信機のバッテリー:4 *単三電池(別売り)
寸法:500mm x 500mm x 190mm
SYMA X8PRO 10630円 SUREHOBBY
SYMA X8SW 13030円 SUREHOBBY
HUBSAN X4 H502E + ゼブラのマッキー 紫 [ドローン]
H502Eの動画画質はそんなに悪くないのですが、色味が悪すぎます。
映像が暗い時の様な緑色なのか、単純にホワイトバランスがずれているのか分かりませんが、それを補正するためのyoutubeにはH502の色々な情報が溢れています。
基本的に紫色のフィルターをかけると本来の色に近づくということらしいです。
ということで、DAISOのマジックではなく手元にあったマッキーの紫を利用してフィルターを作ってみました。


参考動画よりかなり濃い紫ですが撮影した画像はこんな感じで以前の動画よりかなり自然に見えます。
(参考動画の方がかなり綺麗ですが)

初期の頃の画像

そしてビスを逆に打ち込んで締め込められなくなったシャフトがやっと届きましたので、分解再組立。
H502S用の白いプロペラに交換してみましたが、届いたプロペラのDカット位置が180度ずれていたので最初組み付けられなくて焦りました。

悪名高き シュアホビーに4月22日に注文して5月14日に届きました。(国際書留小包)
なぜ深センにある会社なのにオランダから発送なのだろうか?。全く意味が分かりません。
2017-05-14 15:48 OKAYAMA, OKAYAMAMINAMI, 702-8799, Final delivery
2017-05-13 13:27 OKAYAMA, OKAYAMAMINAMI, 702-8799, Processing at delivery Post Office
2017-05-12 06:00 KANAGAWA, KAWASAKIHIGASHI, 219-8799, Departure from inward office of exchange
2017-05-11 09:00 KANAGAWA, KAWASAKIHIGASHI, 219-8799, Held by import Customs
2017-05-11 00:57 KANAGAWA, KAWASAKIHIGASHI, 219-8799, Arrival at inward office of exchange
2017-05-05 09:45 NETHERLANDS, AMSTERDAM E INTERNATIONAL MAIL, Dispatch from outward office of exchange
发件国家 - 查询耗时:1831 毫秒
2017-05-14 15:48 The item has been delivered successfully
2017-05-13 13:27 Receive item at delivery office (Inb)
2017-05-11 00:57 The item has been processed in the country of destination
2017-05-08 13:48 The item has arrived in the country of destination
2017-05-05 17:42 The item is on transport to the country of destination
2017-05-05 09:45 The item is at the PostNL sorting center
2017-05-05 09:45 The item is processed at the PostNL sorting center
2017-05-02 11:27 The item is pre-advised
映像が暗い時の様な緑色なのか、単純にホワイトバランスがずれているのか分かりませんが、それを補正するためのyoutubeにはH502の色々な情報が溢れています。
基本的に紫色のフィルターをかけると本来の色に近づくということらしいです。
ということで、DAISOのマジックではなく手元にあったマッキーの紫を利用してフィルターを作ってみました。


参考動画よりかなり濃い紫ですが撮影した画像はこんな感じで以前の動画よりかなり自然に見えます。
(参考動画の方がかなり綺麗ですが)

初期の頃の画像

そしてビスを逆に打ち込んで締め込められなくなったシャフトがやっと届きましたので、分解再組立。
H502S用の白いプロペラに交換してみましたが、届いたプロペラのDカット位置が180度ずれていたので最初組み付けられなくて焦りました。

悪名高き シュアホビーに4月22日に注文して5月14日に届きました。(国際書留小包)
なぜ深センにある会社なのにオランダから発送なのだろうか?。全く意味が分かりません。
2017-05-14 15:48 OKAYAMA, OKAYAMAMINAMI, 702-8799, Final delivery
2017-05-13 13:27 OKAYAMA, OKAYAMAMINAMI, 702-8799, Processing at delivery Post Office
2017-05-12 06:00 KANAGAWA, KAWASAKIHIGASHI, 219-8799, Departure from inward office of exchange
2017-05-11 09:00 KANAGAWA, KAWASAKIHIGASHI, 219-8799, Held by import Customs
2017-05-11 00:57 KANAGAWA, KAWASAKIHIGASHI, 219-8799, Arrival at inward office of exchange
2017-05-05 09:45 NETHERLANDS, AMSTERDAM E INTERNATIONAL MAIL, Dispatch from outward office of exchange
发件国家 - 查询耗时:1831 毫秒
2017-05-14 15:48 The item has been delivered successfully
2017-05-13 13:27 Receive item at delivery office (Inb)
2017-05-11 00:57 The item has been processed in the country of destination
2017-05-08 13:48 The item has arrived in the country of destination
2017-05-05 17:42 The item is on transport to the country of destination
2017-05-05 09:45 The item is at the PostNL sorting center
2017-05-05 09:45 The item is processed at the PostNL sorting center
2017-05-02 11:27 The item is pre-advised
HUBSAN X4 H502E ベアリングに換装 [ドローン]
到着したベアリングに交換しました。

大きさ的に外径が少し大きいのかハマりにくいですね。
樹脂軸受よりはシャフトのガタもなくなり精度良く回りますが、ボールのゴリゴリ感があってあまり性能はよく無さそうですw
そんなことより、シャフトのCW,CCWが有ることを忘れていて、プロペラを取り付ける時に逆ネジ用のシャフトに無理やり標準ネジを締め込んでしまっていることに2本目を締める時に気付いて、再びばらした後、再組立できましたが、その間違ったシャフトに締め込んだ逆ネジは二度とビスが外れなくなったようです・・・・ CCW用シャフトを買わなければなりませぬ。
そして、タダの重りになっている、いらない飾りも取り去りましたww

前回行っているシールドの効果はありませんでした。
ベアリングに換えた効果は
始動時のプロペラ音がすごく静かになっています。
電池の寿命も長くなっているようですが、モーターが元気になった分
動画のこんにゃく現象が大きくなったかもしれません。
しかし、今回の事と関係ないとは思いますが、着陸後、プロポをハの字にしてモーターを停止しようとしても停止しなくなりました。
なんでだろう・・・・
しようがないので、機体を鷲掴みにしてひっくり返すとモーターが停止するようなので、現状そうしていますが、たまにプロペラの回転が上がって反撃にあうので少し怖いですw

大きさ的に外径が少し大きいのかハマりにくいですね。
樹脂軸受よりはシャフトのガタもなくなり精度良く回りますが、ボールのゴリゴリ感があってあまり性能はよく無さそうですw
そんなことより、シャフトのCW,CCWが有ることを忘れていて、プロペラを取り付ける時に逆ネジ用のシャフトに無理やり標準ネジを締め込んでしまっていることに2本目を締める時に気付いて、再びばらした後、再組立できましたが、その間違ったシャフトに締め込んだ逆ネジは二度とビスが外れなくなったようです・・・・ CCW用シャフトを買わなければなりませぬ。
そして、タダの重りになっている、いらない飾りも取り去りましたww
前回行っているシールドの効果はありませんでした。
ベアリングに換えた効果は
始動時のプロペラ音がすごく静かになっています。
電池の寿命も長くなっているようですが、モーターが元気になった分
動画のこんにゃく現象が大きくなったかもしれません。
しかし、今回の事と関係ないとは思いますが、着陸後、プロポをハの字にしてモーターを停止しようとしても停止しなくなりました。
なんでだろう・・・・
しようがないので、機体を鷲掴みにしてひっくり返すとモーターが停止するようなので、現状そうしていますが、たまにプロペラの回転が上がって反撃にあうので少し怖いですw
HUBSAN X4 H502E の改造 [ドローン]
今日はるばる北京からベアリングが届くみたいなので、昨日の時点で予めばらしておこうかなと
バラし始めましたが、バラすついでにちょこっと改造まがいなこととやってみました。
まず、モーターの動力線をツイスト。

次に、バッテリーが間に入っているのでほぼ意味はないカメラ&画像処理基板のシールド。

モーターが一番寿命が短いそうですね。
オリエンタルモーターさんのサイトを見てみると、寿命の原因はやはり熱が一番みたいです。
https://www.orientalmotor.co.jp/tech/reference/life01/
①グリースが熱により劣化するグリース寿命
②転がり疲れによる機械的寿命
モーターではほとんどの場合、軸受に加わる荷重に起因する機械的寿命の影響よりも、発熱によるグリース寿命への影響が大きいため、①のグリース寿命が支配的となります。
この軸受グリース寿命に最も影響を与える要因は温度であり、寿命時間が大きく左右されます。このことを簡単に表現したものが下図のグラフです。
このグラフは、軸受の温度が15℃上昇するごとに、軸受グリース寿命が半減するということを表現しています。
ということなので1℃でも冷えるかな~なんて思いながら
次は、モーター部分のボディーの穴あけ

真ん中に2mmくらい残して 端は5mmくらいに残るようにフリーハンドで下書きしてから

カッターでゴリゴリ・・・・・

プロペラからかなりな風量がモーターに直撃しているはずなので、モータケースに風が直接当たれば少しは効果があるはず。
あとはナイロン軸受を今日届くベアリングへ交換すれば完成です。
それとアルミテープでモーターヒートシンクでもつくるかな。
バラし始めましたが、バラすついでにちょこっと改造まがいなこととやってみました。
まず、モーターの動力線をツイスト。

次に、バッテリーが間に入っているのでほぼ意味はないカメラ&画像処理基板のシールド。

モーターが一番寿命が短いそうですね。
オリエンタルモーターさんのサイトを見てみると、寿命の原因はやはり熱が一番みたいです。
https://www.orientalmotor.co.jp/tech/reference/life01/
①グリースが熱により劣化するグリース寿命
②転がり疲れによる機械的寿命
モーターではほとんどの場合、軸受に加わる荷重に起因する機械的寿命の影響よりも、発熱によるグリース寿命への影響が大きいため、①のグリース寿命が支配的となります。
この軸受グリース寿命に最も影響を与える要因は温度であり、寿命時間が大きく左右されます。このことを簡単に表現したものが下図のグラフです。
このグラフは、軸受の温度が15℃上昇するごとに、軸受グリース寿命が半減するということを表現しています。
ということなので1℃でも冷えるかな~なんて思いながら
次は、モーター部分のボディーの穴あけ

真ん中に2mmくらい残して 端は5mmくらいに残るようにフリーハンドで下書きしてから
カッターでゴリゴリ・・・・・

プロペラからかなりな風量がモーターに直撃しているはずなので、モータケースに風が直接当たれば少しは効果があるはず。
あとはナイロン軸受を今日届くベアリングへ交換すれば完成です。
それとアルミテープでモーターヒートシンクでもつくるかな。
HUBSAN H502Eで空撮 [ドローン]
サービス品で同梱されていなかった、プロペラガードがお店から届いたので取り付けました。
一回りでかくなりました・・・・

あと、アルミテープ貼り付けと、ボディーに穴を開けてアンテナを外出し
どちらも意味があるのか無いのか分かりませんwww

とりあえず、プロポの表示では350m~400mの範囲まで電波が届いている様子ですが、目視では移動しているかさっぱりわからないので・・・・
youtubeでは無改造で500m届いたそうなので、改造の意味は今のところない様子ですw
動画キャプチャした画像ですが、静止画より綺麗はまともですね~


やはり全体的に緑っぽい事に変化なし。
ノイズ感は少なくなりましたけど、前回が曇天だったので、今回は天気が良かったおかげだけなのかもね
ということで、画質もアルミシールドの効果はないのかも・・・
また、静止画ってFHDは無さそうな解像度。
今のところ動画撮影中にしか撮影していないのでよくわからないですが、動画撮影中の静止画は動画のHD解像度を無理やりFHDに引き伸ばしている感じに見えます。
こんな文句ばかり言っていますが、
たった1万円のドローンでこんなに簡単に安定した状態で数百m操作できて動画も撮影できるとは驚いていますし、これは本当にコスパの良い楽しいおもちゃと思っています。
後は、
プロペラ軸受けのベアリング化を行い
送信機用のバッテリー(H901A?)を付けて飛ばせられるかなど考えてみたいと思っています。
サイズ的に
送信機用は厚さが6mm増えて重さが20g重くなります。
容量は790mAhアップ
ボディー内に収めるのは難しいので、お腹に抱き合わせる方法になるかな。
一回りでかくなりました・・・・

あと、アルミテープ貼り付けと、ボディーに穴を開けてアンテナを外出し
どちらも意味があるのか無いのか分かりませんwww

とりあえず、プロポの表示では350m~400mの範囲まで電波が届いている様子ですが、目視では移動しているかさっぱりわからないので・・・・
youtubeでは無改造で500m届いたそうなので、改造の意味は今のところない様子ですw
動画キャプチャした画像ですが、静止画より綺麗はまともですね~


やはり全体的に緑っぽい事に変化なし。
ノイズ感は少なくなりましたけど、前回が曇天だったので、今回は天気が良かったおかげだけなのかもね
ということで、画質もアルミシールドの効果はないのかも・・・
また、静止画ってFHDは無さそうな解像度。
今のところ動画撮影中にしか撮影していないのでよくわからないですが、動画撮影中の静止画は動画のHD解像度を無理やりFHDに引き伸ばしている感じに見えます。
こんな文句ばかり言っていますが、
たった1万円のドローンでこんなに簡単に安定した状態で数百m操作できて動画も撮影できるとは驚いていますし、これは本当にコスパの良い楽しいおもちゃと思っています。
後は、
プロペラ軸受けのベアリング化を行い
送信機用のバッテリー(H901A?)を付けて飛ばせられるかなど考えてみたいと思っています。
サイズ的に
送信機用は厚さが6mm増えて重さが20g重くなります。
容量は790mAhアップ
ボディー内に収めるのは難しいので、お腹に抱き合わせる方法になるかな。


